Three-finger smart end-effector for palm of three-motor-driven serial mechanism
A technology of end effector and tandem mechanism, applied in the directions of manipulators, manufacturing tools, chucks, etc., can solve the problems of large offset, misalignment of datums, high difficulty, etc., and achieve good size adaptability, large size range, and synergy Good results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The specific implementation manner of the present invention will be described below in conjunction with the accompanying drawings.
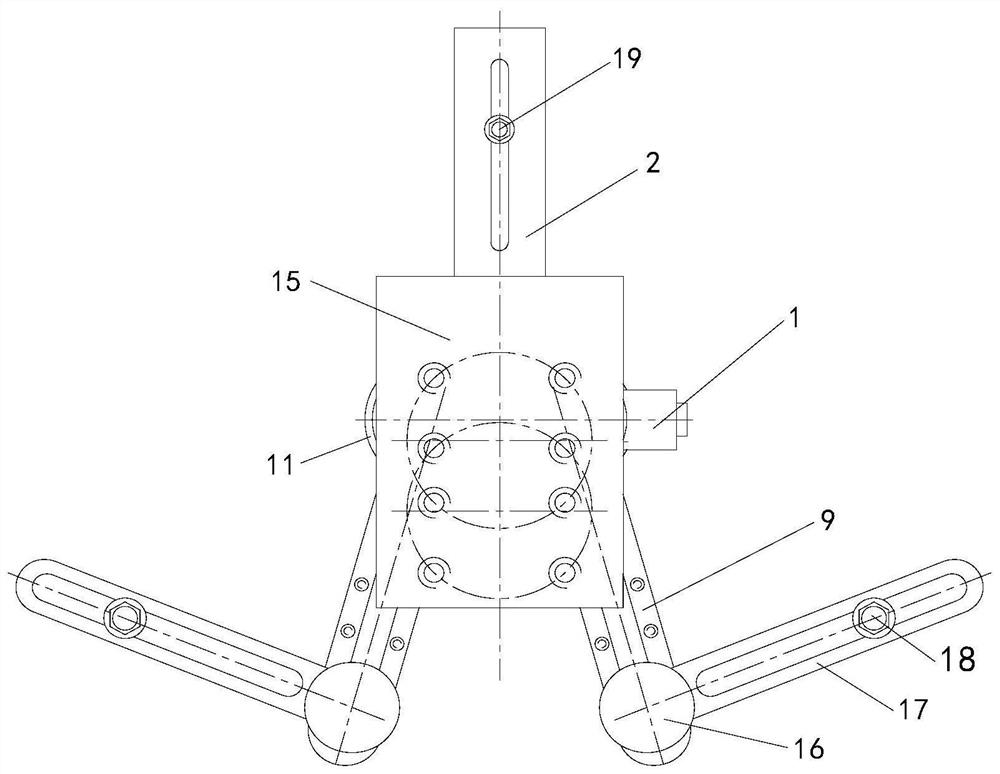
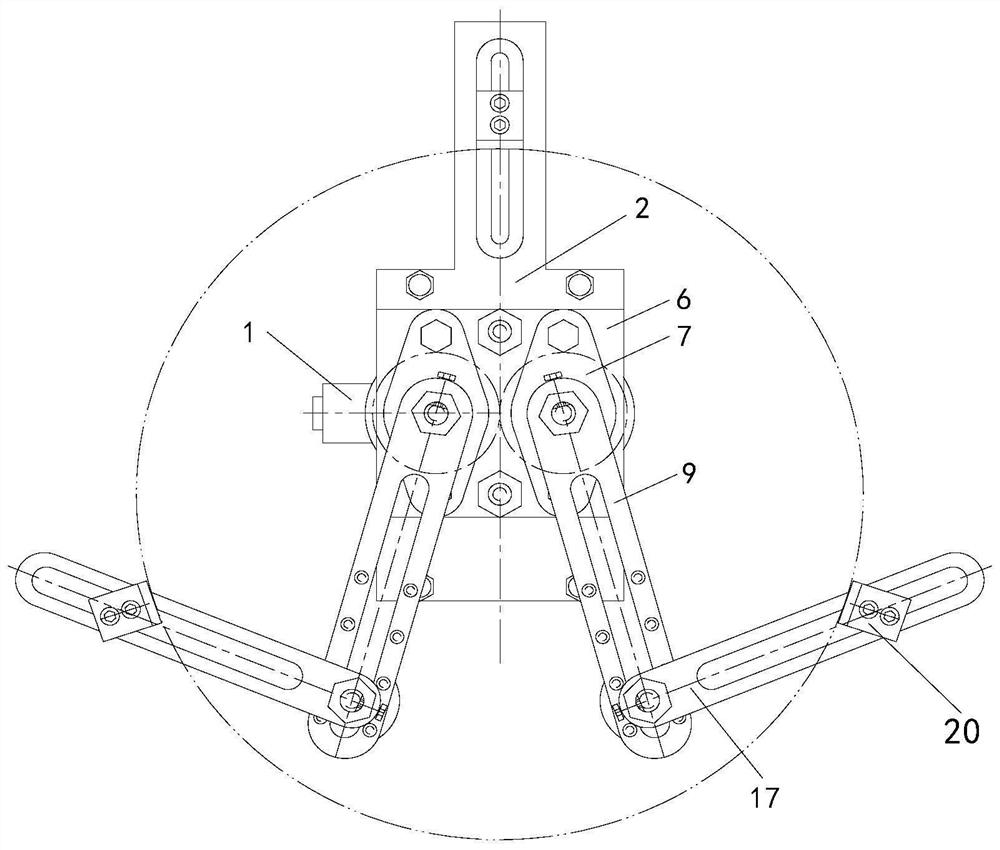
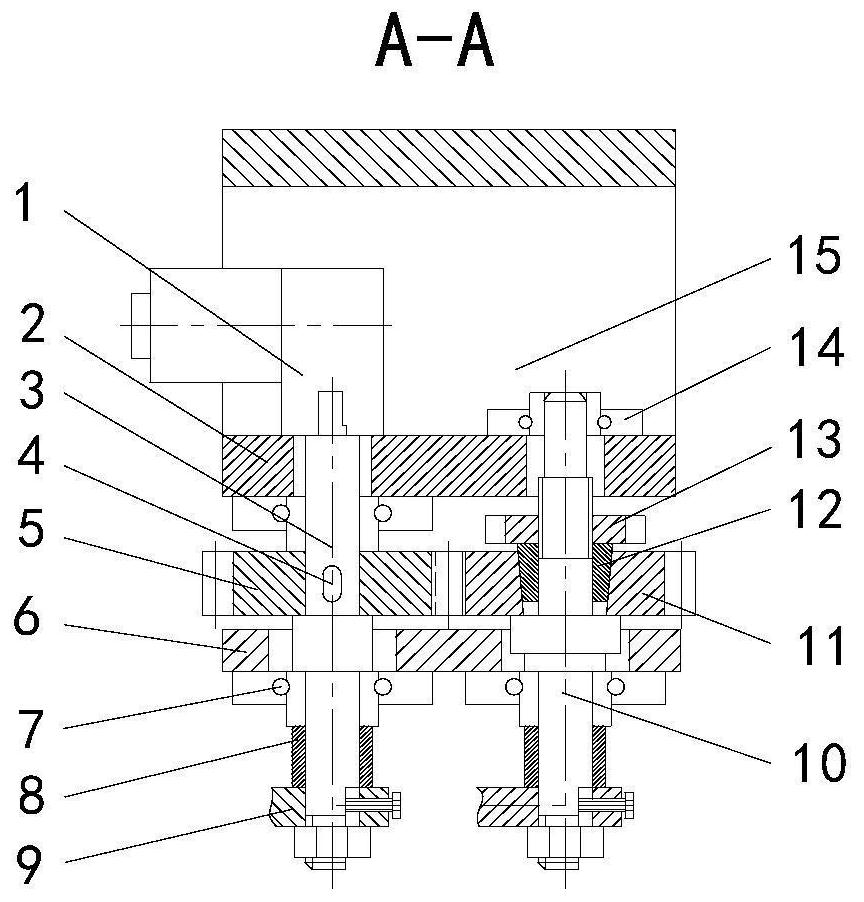
[0042] Such as Figure 1-19 As shown, the three-finger dexterous end effector of the palm of the hand driven by three motors in series in this embodiment has three right-angle plate fingers 20, one right-angle plate finger 20 with manual eccentricity adjustment and fixing, and two fingers 20 respectively fixed in two slots. Right-angle plate fingers 20 on two bars 17 or two slotted bars 9; Two slotted bars 9 are driven by motor worm gear reducer 1 and relatively reversely rotated, based on two slotted bars 9, two The two slotted rods 17 are respectively driven by a motor planetary gear reducer 16 to rotate positively or reversely, and a motor worm gear reducer 1 and two motor planetary gear reducers 16 are cooperatively controlled; including a motor worm gear reducer 1 and a base plate 2 , threaded head drive shaft 3, two slotted one rods...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More