

Load-based speed control method and device, robot and storage medium
A technology of speed control and robotics, applied in the field of robotics, can solve problems such as motor damage, reduced robot motor life, and slow moving speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] It should be understood that the specific embodiments described here are only used to explain the present application, not to limit the present application.
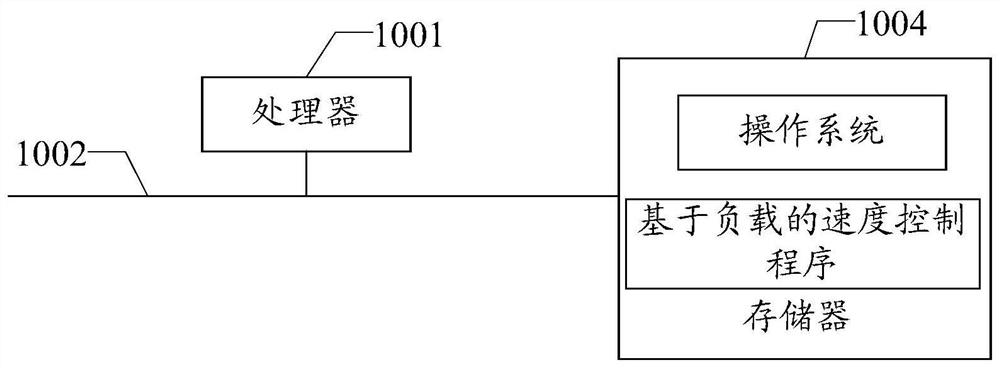
[0042] refer to figure 1 , figure 1 It is a schematic structural diagram of a terminal device in the hardware operating environment involved in the solution of the embodiment of the present application.
[0043] In this embodiment, the load-based speed control method is applied to a speed control system subordinate to a speed control device subordinate to a robot.
[0044] Such as figure 1 As shown, the speed control device (or terminal, or robot) may include: a processor 1001 , such as a CPU (Central Processing Unit, central processing unit), a memory 1004 , and a communication bus 1002 . The communication bus 1002 is used to realize connection communication between these components. The memory 1004 can be a high-speed RAM memory, or a stable memory (non-volatile memory), such as a disk memory. Optionally, t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More