

Robot path planning method based on self-adaptive sparrow search algorithm
A search algorithm and path planning technology, applied in instruments, navigation calculation tools, two-dimensional position/channel control, etc., can solve local optimal problems, achieve high convergence speed, improve search performance and development performance, and increase population diversity sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
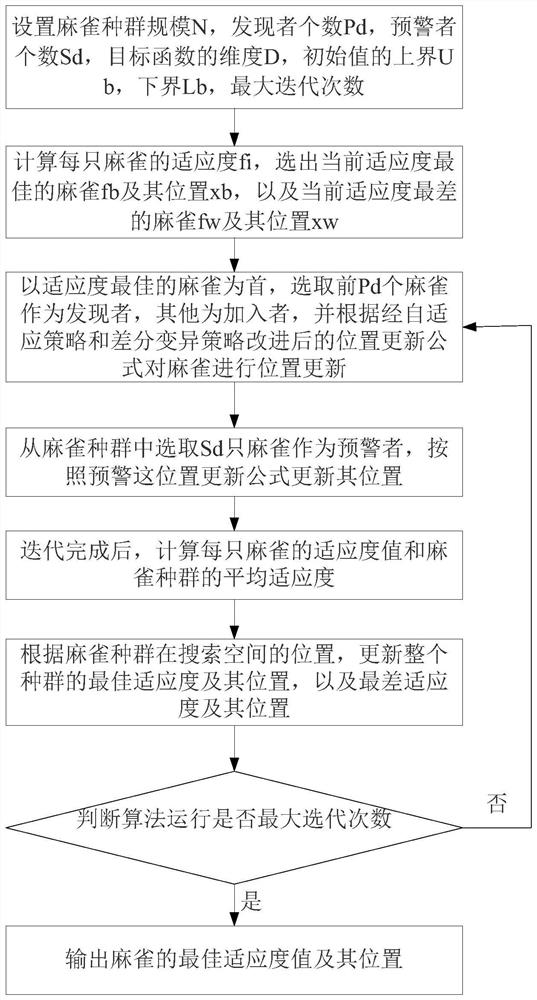
[0047] The present invention will be further described below in conjunction with drawings and embodiments.
[0048] Step 1: The adaptive strategy improves the mathematical model of the sparrow algorithm.
[0049] The standard SSA algorithm is to find the solution of the optimization problem by simulating the foraging process of sparrows. The principle of the algorithm is: Divide the sparrow population with an early warning mechanism into two types: discoverers and joiners. The discoverers themselves have a high degree of fitness and have a wider search range, and are responsible for guiding the population to search for food. When the sparrow detects danger, the discoverer will also lead the joiner to move to a safe area. The joiner follows the finder for better fitness. At the same time, in order to increase their own predation rate, some joiners will compete for food or forage around the finder. In particular: the identities of discoverers and joiners in the population cha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More