

AUV slack trajectory planning method
A technology of trajectory planning and track planning, which is applied in the direction of instruments, control/regulation systems, vehicle position/route/altitude control, etc., and can solve problems such as not considering moving obstacles, not applicable to AUV, and not applicable to deliberate motion planning , to achieve the effect of enhancing population diversity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
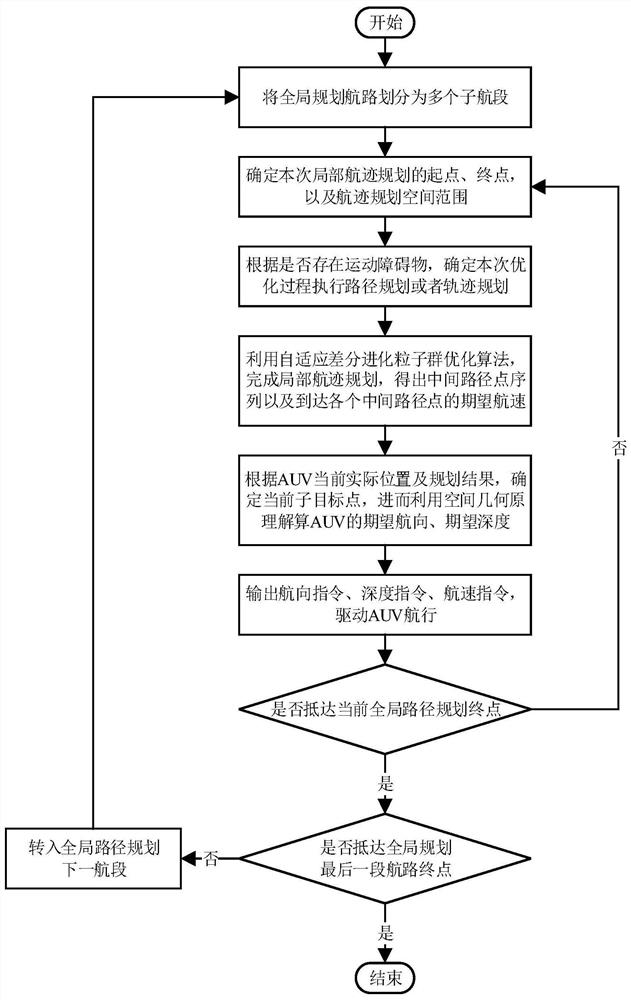
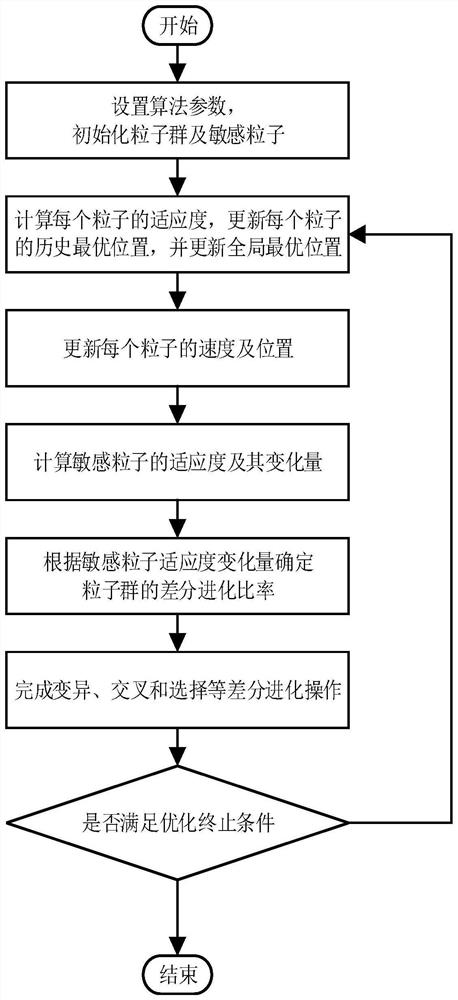
[0049] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
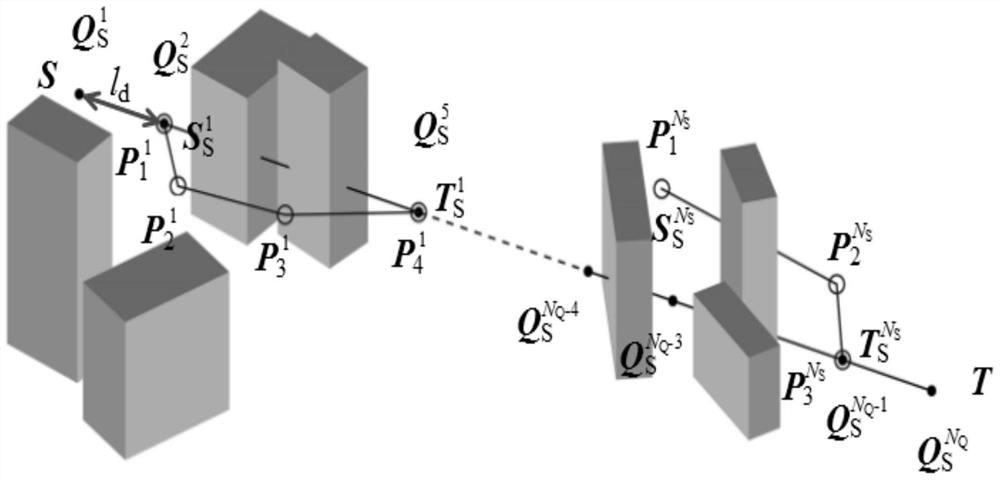
[0050] combine figure 1 and figure 2 , the present invention divides the global planning route into several sub-segments, executes online track planning in each sub-segment in turn, executes path planning if there are only static obstacles, and executes trajectory planning if there are motion obstacles; proposes an ADEPSO algorithm , introduce the differential evolution mechanism and dynamic optimization idea into the basic particle swarm optimization algorithm to enhance the population diversity, improve the global optimization ability, and enhance the adaptability to dynamic constraints, and then apply the optimization algorithm to solve the AUV relaxation trajectory planning problem .
[0051] When the AUV performs tasks underwater, a series of target points are usually set by the surface monitoring system and issued to the AUV in the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More