

Pilotless automobile longitudinal control method
A technology of unmanned vehicles and longitudinal control, applied to control devices, internal combustion piston engines, mechanical equipment, etc., can solve problems such as lack of theoretical support, MPC lost initial moment, MPC iterative feasibility and stability analysis, etc., to achieve stable The effect of small state error and short adjustment time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] The invention provides a longitudinal control method of an unmanned vehicle, the control method combines MPC and linear TD, and considers the influence of the control amount and the control amount increment constraint. At the same time, the design process of each part of the scheme is based on a complete theoretical analysis process to determine the parameter range to ensure the basic requirements of each part, including the convergence of linear TD, the iterative feasibility and stability of MPC.
[0048] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
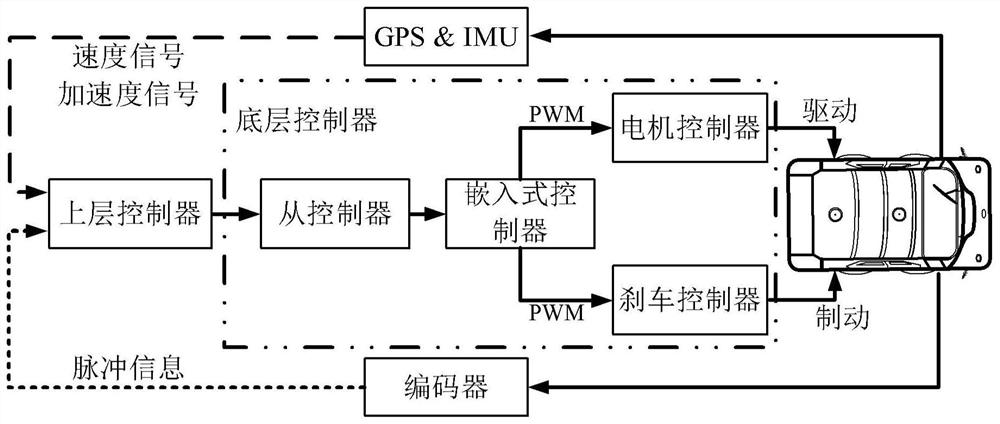
[0049] Longitudinal control (closed loop) systems including sensors, actuators, controllers such as figure 1 As shown, its workflow will be described in detail after the design scheme. For such a vertical closed-loop s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More