

Vision-based robot obstacle avoidance method
A robotic and visual technology, applied in instruments, simulators, computer control, etc., can solve problems such as lighting changes that cannot work properly, waste of space, and large amount of calculation, achieve lightweight and concise computing speed, break through technical blockades, and improve processing. effect of speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The present invention is described in further detail now in conjunction with accompanying drawing.
[0049] It should be noted that terms such as "upper", "lower", "left", "right", "front", and "rear" quoted in the invention are only for clarity of description, not for Limiting the practicable scope of the present invention, and the change or adjustment of the relative relationship shall also be regarded as the practicable scope of the present invention without substantive changes in the technical content.
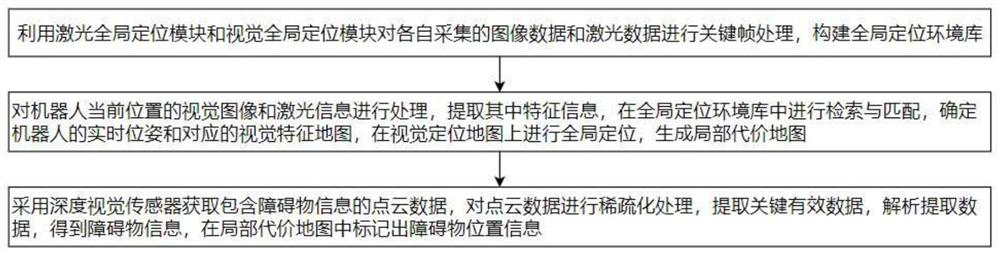
[0050] combine figure 1 , the present invention mentions a kind of robot obstacle avoidance method based on vision, described obstacle avoidance method comprises the following steps:
[0051] S1, using the laser global positioning module and the visual global positioning module to perform key frame processing on the image data and laser data collected respectively, and constructing a global positioning environment library, the global positioning environment library...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More