

Unmanned aerial vehicle autonomous landing method based on visual identification
A technology of visual recognition and drones, applied in the field of drones, can solve problems such as the inability to adaptively determine the threshold value, the inability to specially design positioning algorithms, and the inability to guarantee positioning accuracy, so as to reduce attitude errors and improve positioning accuracy. High and ensure the effect of positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029]The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
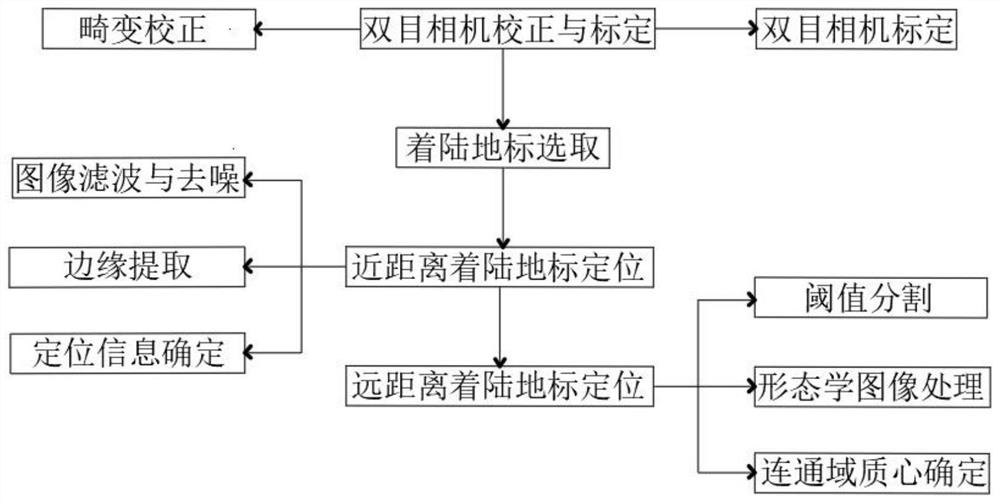
[0030] see figure 1 , an autonomous landing method for UAVs based on visual recognition, including binocular camera correction and calibration 1—landing landmark selection 2—close landing landmark positioning 3—long-distance landing landmark positioning 4, the specific steps are as follows:
[0031] Binocular camera correction and calibration 1: By correcting and calibrating the camera, any point in the world coordinate system can be converted to the pixel coor...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More