

Multi-variety bottled beverage service robot and using method thereof
A service robot, multi-variety technology, used in instruments, coin-free or similar appliances, coin-operated equipment for distributing discrete items, etc. question
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0048] This embodiment is a multi-variety bottled beverage service robot.
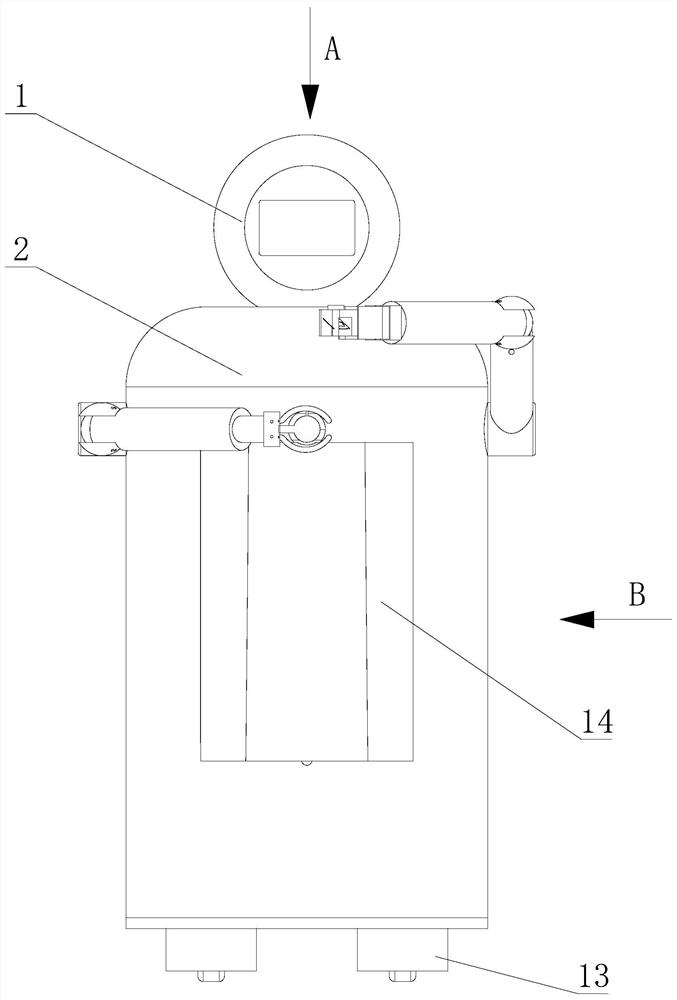
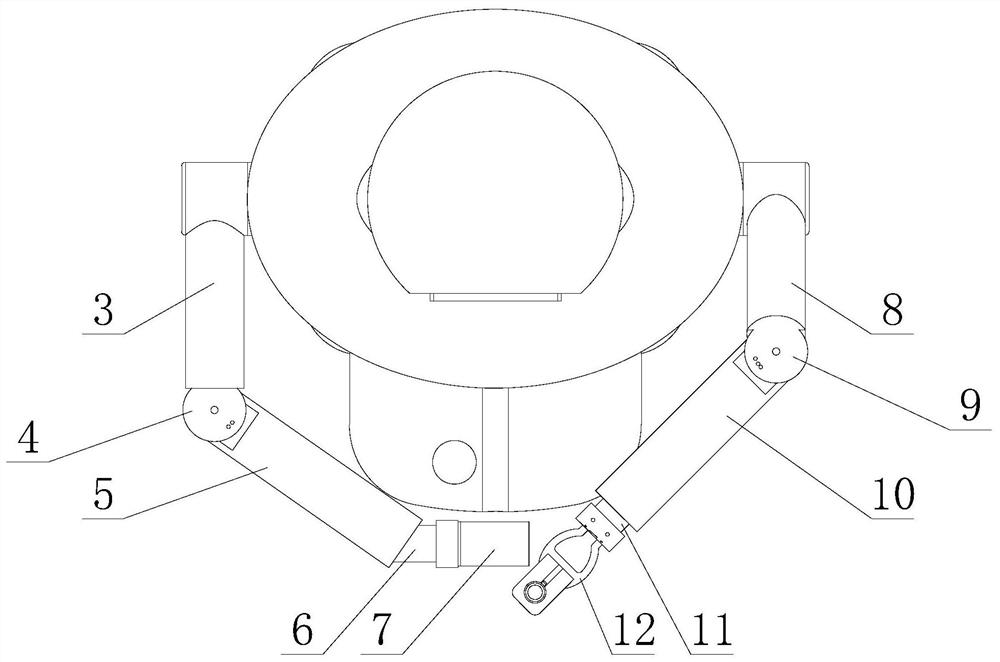
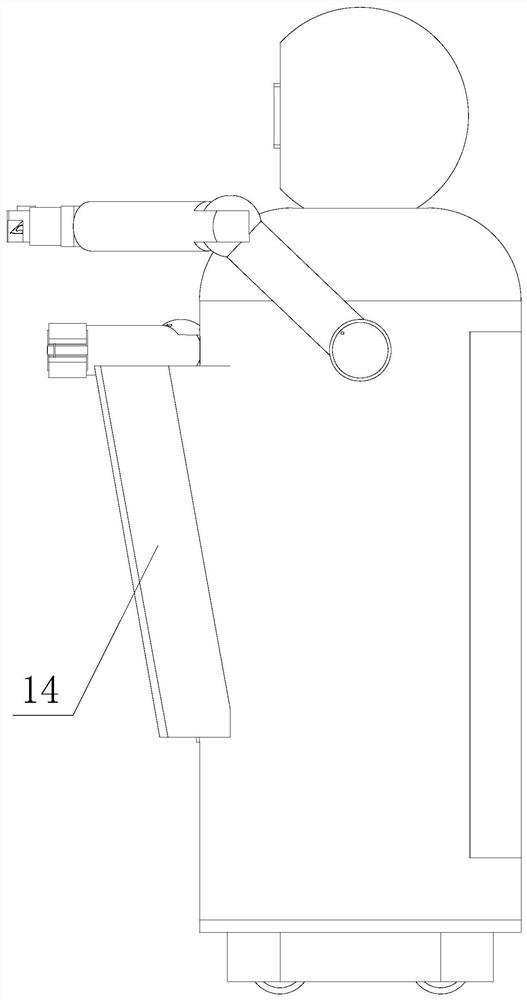
[0049] (1) The main components of its overall structure are as follows: Figure 1 to Figure 4 As shown, including: head 1, body 2, right upper arm 3, right elbow joint 4, right forearm 5, right wrist joint 6, bottle-holding hand 7 (right hand), left upper arm 8, left elbow joint 9, left forearm 10. Left wrist joint 11, uncapping hand 12 (ie left hand), foot 13, bottle cap warehouse 14, back door 15, bottle fetching and supplying system 16, etc.
[0050] On the head of the service robot, a display screen is installed on the face, which is convenient for consumers to operate. A microcomputer is installed inside the head as the control system of the entire service robot. The control system can adopt the same control system as the existing similar robots.
[0051] The right upper arm and the right forearm are connected through the right elbow joint, and the right hand (that is, the bottle-holding hand) is...
Embodiment 2
[0072] In this embodiment, a method for using a multi-variety bottled beverage service robot is implemented by the service robot described in Embodiment 1, including the working process of the bottle warehouse when the bottle is picked up by the bottle feeding system, the working process of feeding after the bottle is picked up, and the holding time. The bottle hand cooperates with the uncapping hand to realize the working process of uncapping. details as follows:
[0073] (1) The working process of the bottle warehouse when taking the bottle:
[0074] As shown in Figure 15(a) and Figure 15(b), wherein Figure 15(a) is the initial state, the push-pull electromagnet is not energized at this time, the lower hook of the clamping plate is in contact with the bottle under the warehouse, and the clamping Tight bottle, the bottle in the warehouse will not slip. Figure 15(b) is the electrified state of the push-pull electromagnet, the push-pull electromagnet attracts to cause its man...
Embodiment 3
[0086] This embodiment is a multi-variety bottled beverage service robot. Compared with Embodiment 1, its difference is that: in the bottle-holding hand, the inner sides of the two movable jaws are respectively provided with elastic gaskets, and the increased elasticity The gasket can effectively improve the friction between the movable jaws and the bottle body, further ensuring the stability of the bottle grasping.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More