Discrete adaptive robust sliding mode control method for servo system based on feature model
An adaptive robust, servo system technology, applied in control systems, control generators, vector control systems, etc., can solve the problems of lack of fast tracking ability of system state mutation, poor system robustness, increased chattering, etc. Chattering phenomenon, good filtering effect, effect of suppressing influence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
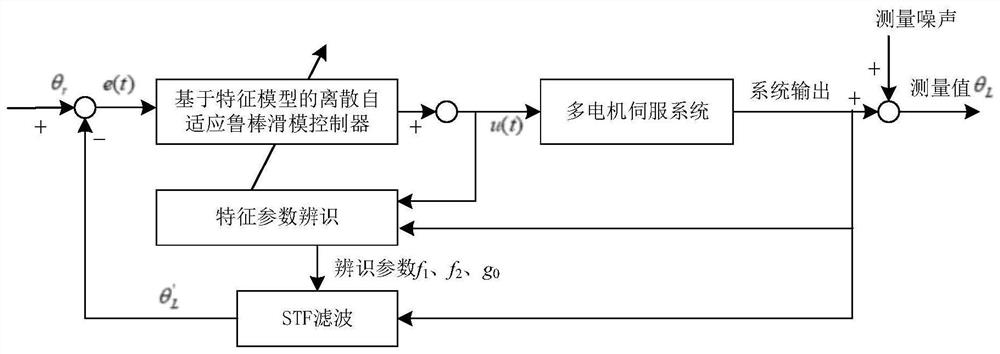
[0014] combine figure 1 , the present invention's discrete adaptive robust sliding mode control method for a servo system based on an eigenmodel comprises the following steps:
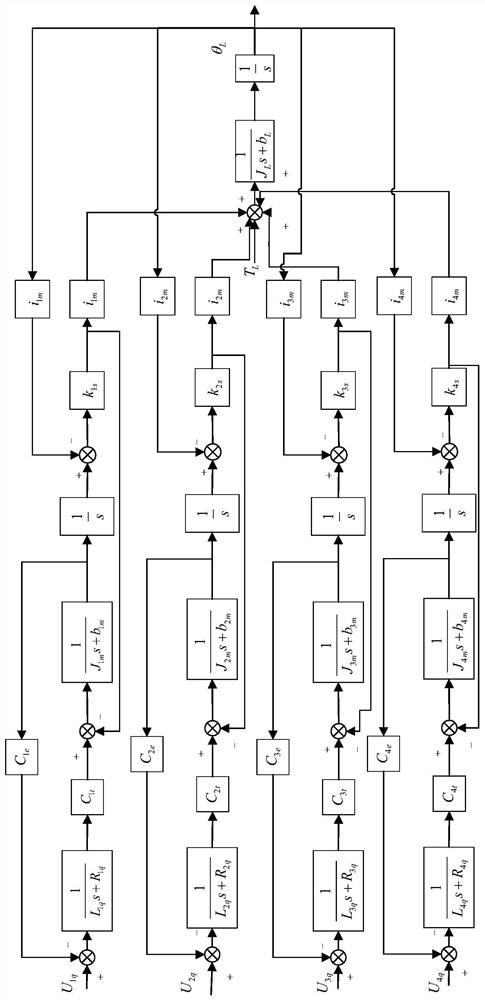
[0015] Step 1. Establish a multi-motor synchronous drive servo system dynamic model;
[0016] Step 2. According to the characteristic modeling theory, the characteristic model of the four-motor servo system with measurement noise is established, and the characteristic model parameters are identified by the recursive least square method;
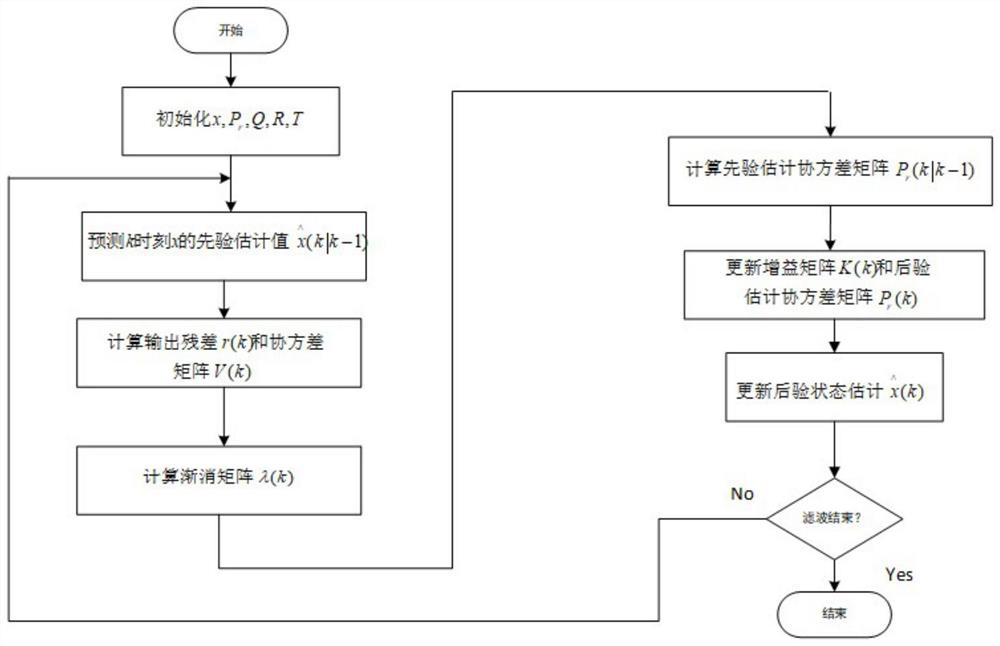
[0017] Step 3. Build an STF strong tracking filter, filter the measurement noise and feed it back to the position controller;
[0018] Step 4. A discrete adaptive robust sliding mode controller is used as the position controller of the four-motor servo system, and the output of the controller is used as the control quantity of the servo system.
[0019] Further, combine figure 2 , step 1 establishes a multi-motor synchronous drive servo system dynamic model with b...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com