

Firework algorithm-based ship dynamic positioning prediction controller design method
A predictive controller and dynamic positioning technology, applied in adaptive control, general control system, control/regulation system, etc., can solve problems such as low efficiency of rolling optimization and control increment not satisfying constraints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0127] The technical solutions in the embodiments of the present invention will be described below with reference to the drawings in the embodiments of the present invention.
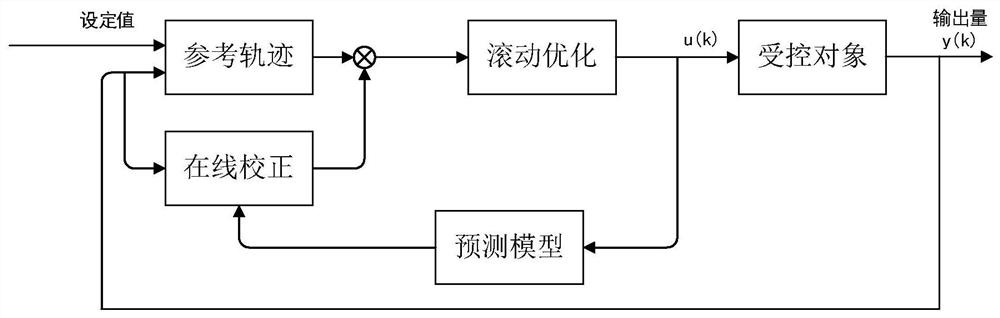
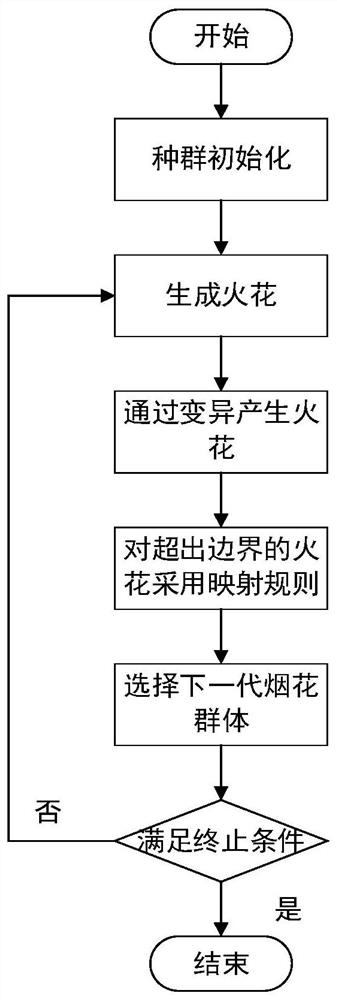
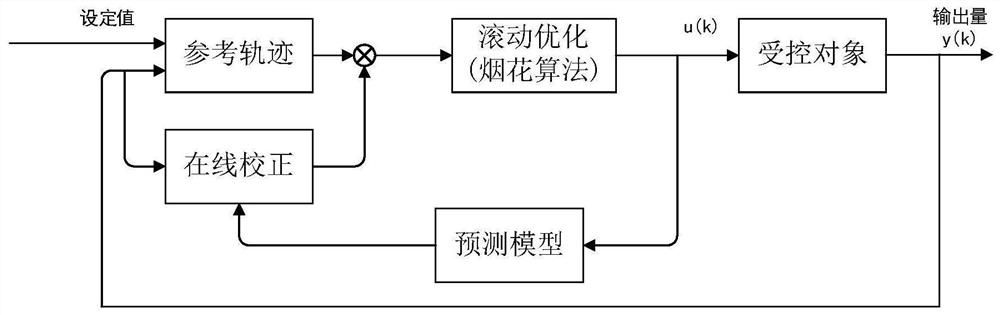
[0128] like Figure 1 to Figure 3 As shown, this paper describes a design method of ship dynamic positioning predictive controller based on fireworks algorithm. The present invention realizes according to the following steps:
[0129] Step 1: Establish a model, establish the earth coordinate system and ship coordinate system required by the ship, analyze and model the ship according to kinematics and dynamics, and obtain the six-degree-of-freedom mathematical model of the ship
[0130]
[0131]
[0132] where vector ν=[u,v,ω,p,q,r] T , represents the linear velocity and angular velocity of the ship in the hull coordinate system, vector η=[x,y,z,φ,θ,ψ] T , representing the position and attitude angle of the ship in the geodetic coordinate system. R(ψ) is the rotation matrix, M is the system ine...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More