

Target detection method based on millimeter wave radar prior positioning and visual feature fusion
A technology of millimeter-wave radar and visual features, applied in neural learning methods, radio wave measurement systems, radio wave reflection/reradiation, etc., to achieve improved accuracy, robust and stable algorithm performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
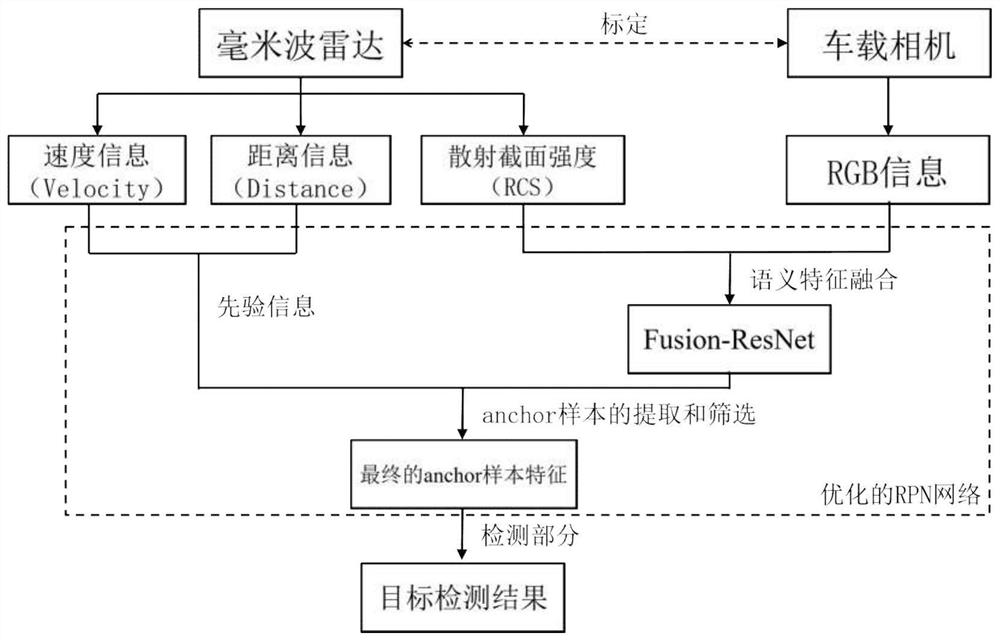
[0037] Such as figure 1 As shown, the present invention proposes a target detection method based on millimeter-wave radar prior positioning and visual feature fusion, including the following steps:
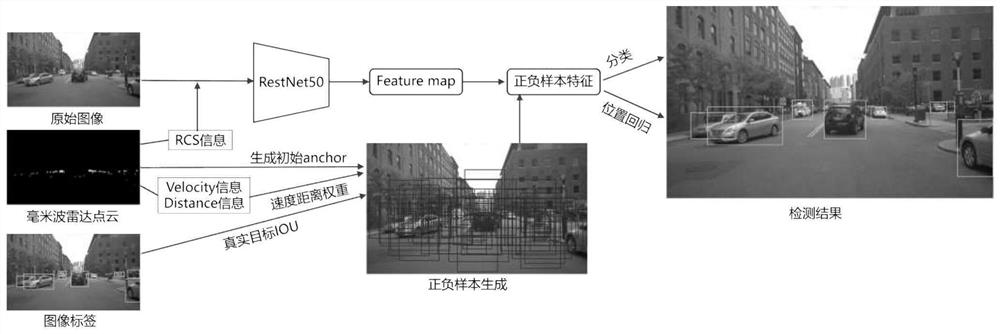
[0038] Step 1) Use the calibrated millimeter-wave radar and vehicle camera two sensors to acquire millimeter-wave radar point cloud data and camera images at the same time; carry out spatial three-dimensional coordinate transformation and project the millimeter-wave radar point cloud data to the camera plane;
[0039] Step 2) Based on the projected millimeter-wave radar point cloud data, multiple anchor samples are generated according to the preset anchor strategy, and the final anchor samples are obtained based on the speed and distance weight of each candidate area; specifically include:
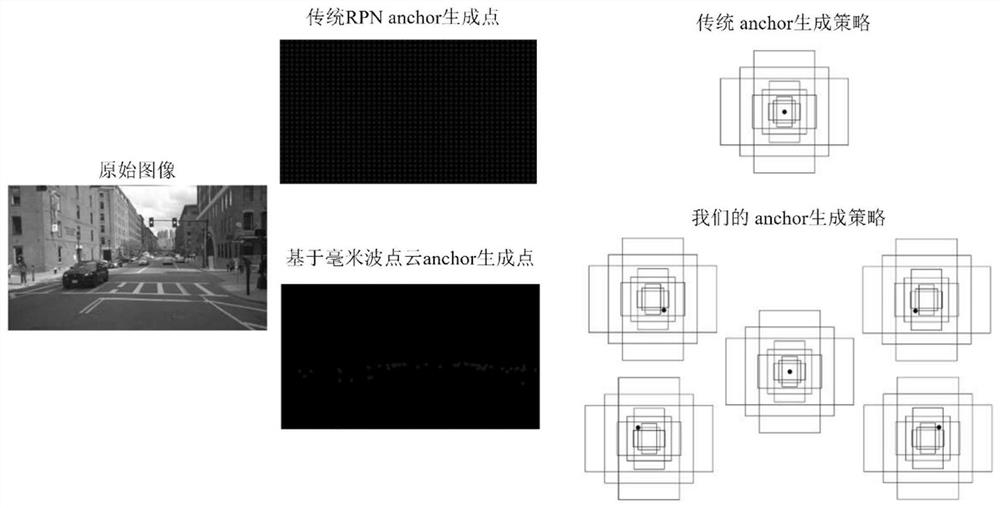
[0040] Step 2-1) In the millimeter-wave radar point cloud data, generate multiple anchor samples according to a preset anchor strategy;
[0041] Such as figure 2As shown, the traditional an...
Embodiment 3
[0072] Embodiment 3 of the present invention may also provide a non-volatile storage medium for storing computer programs. When the computer program is executed by the processor, each step in the above method embodiment 1 can be realized.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More