

Pedestrian indoor positioning method fusing PDR and priori map
An indoor positioning and positioning method technology, applied in the field of positioning, can solve the problems of positioning errors, accumulation of positioning errors, and inaccurate gait detection methods, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
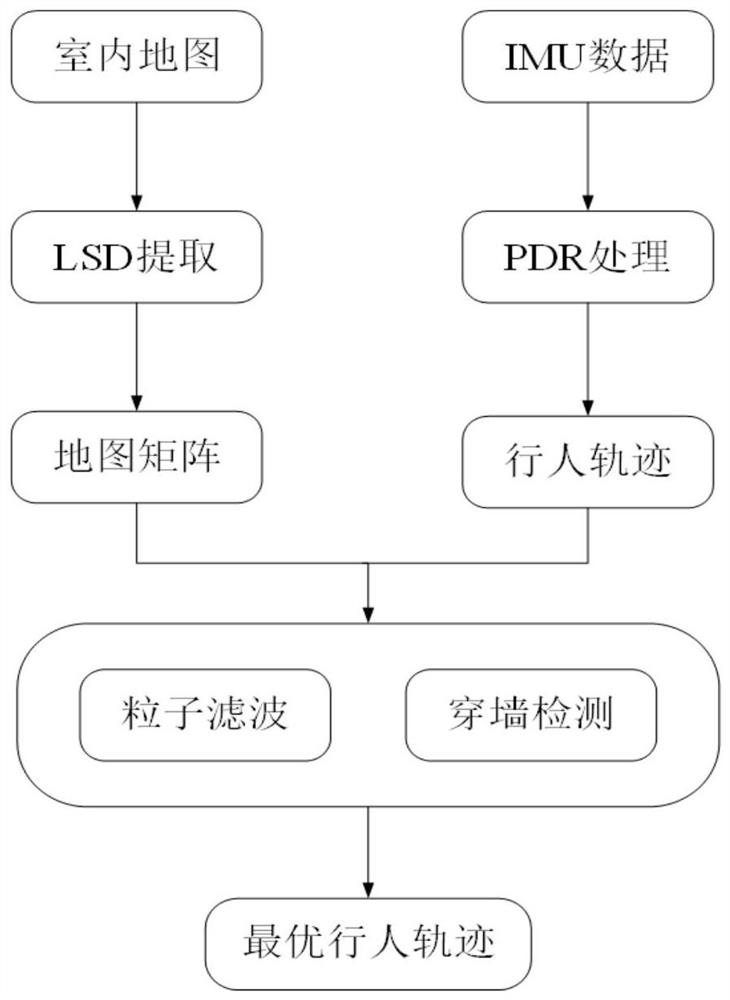
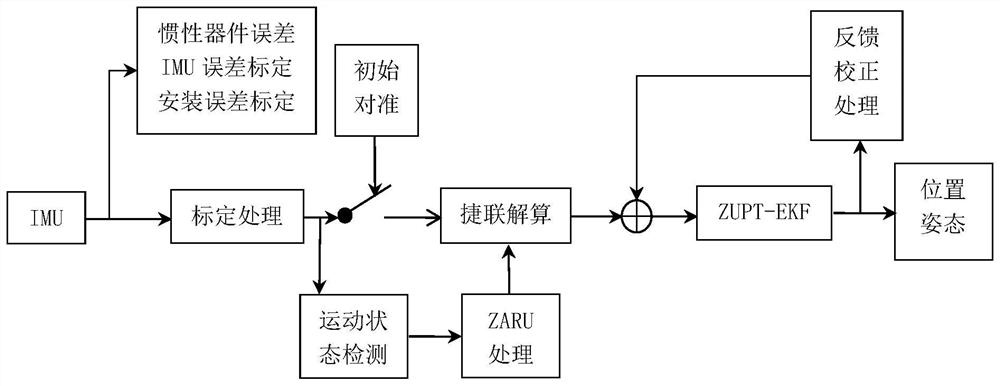
[0201] The location service is divided into indoor and outdoor, and the global positioning system is used to assist in positioning outdoors. But in the indoor environment, due to the complex structure of the wall and other reasons, it is impossible to receive satellite signals. Therefore, PDR has become a good method for indoor positioning due to its passive characteristics. However, the positioning error will accumulate over time. Although the positioning error can use the inertial component IMU to collect pedestrian gait data, and then perform gait detection to determine the moment when the pedestrian is still, and use the speed at this moment as a Kalman filter observations, and then correct the positioning error. However, because the gait detection method may not be accurate enough, positioning errors will still exist. Therefore, in order to correct the positioning error and improve the positioning accuracy, the prior information of the indoor map is added, and the posit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More