

Multi-robot grid map splicing method based on optimal graph matching
A raster map, multi-robot technology, applied in graphics and image conversion, instruments, image analysis and other directions, can solve the problems of large amount of calculation, large overlap of images required for splicing, and high computational cost, and achieves a small amount of calculation and improves robustness. flexibility and scope of application, and the effect of high splicing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
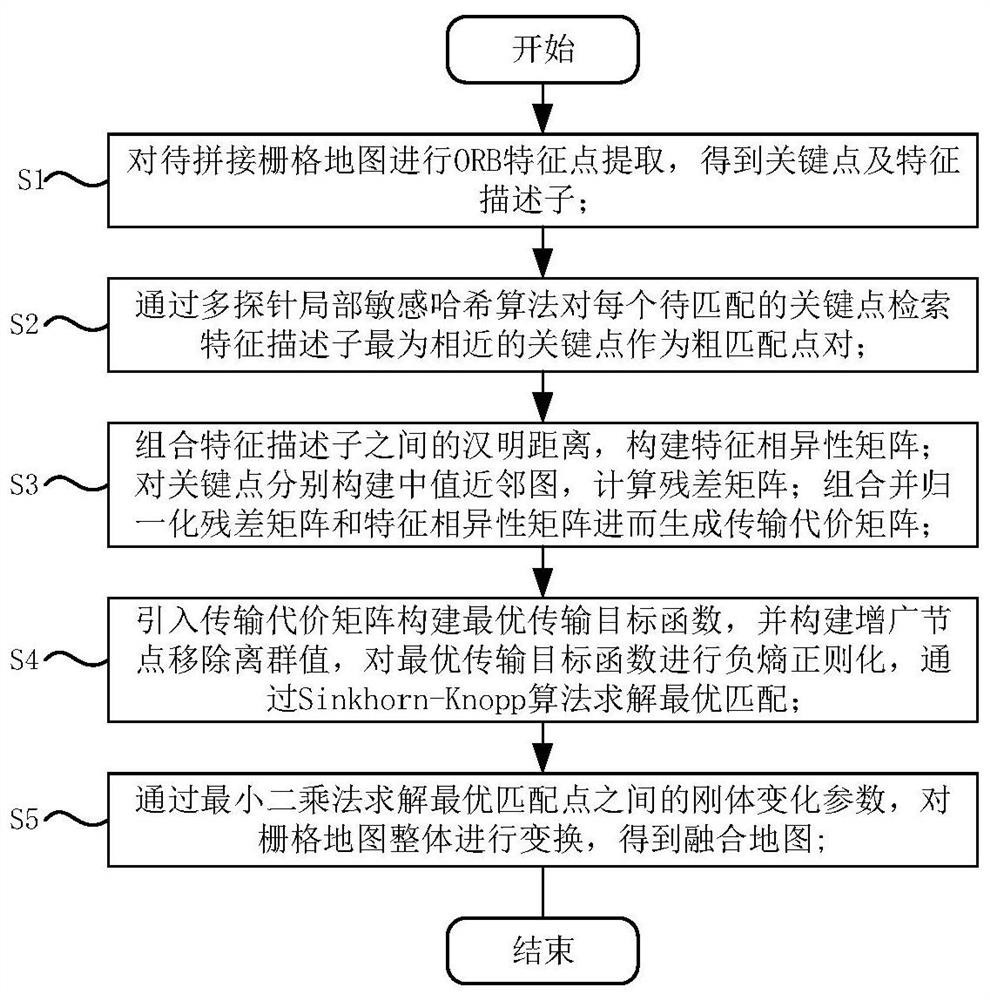
[0059] like figure 1 As shown, a multi-robot grid map mosaic method based on optimal graph matching includes the following steps:
[0060] S1: Extract ORB feature points from the raster map to be stitched to obtain key points and feature descriptors;
[0061] S2: Use the multi-probe local sensitive hashing algorithm to retrieve the key point with the closest feature descriptor for each key point to be matched as a rough matching point pair;
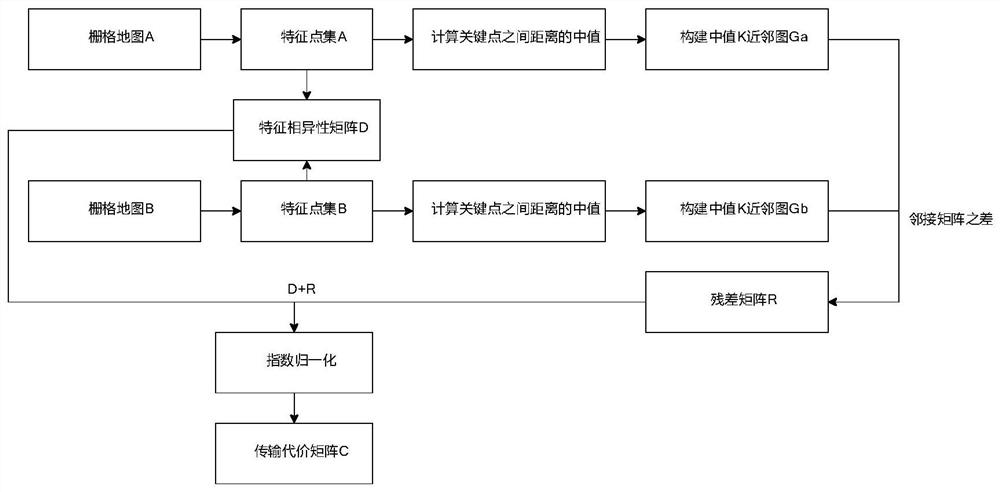
[0062] S3: Combine the Hamming distance between feature descriptors to construct a feature dissimilarity matrix; construct a median K-nearest neighbor map for key points and calculate a residual matrix; combine and normalize the residual matrix and feature dissimilarity matrix to generate Transmission cost matrix;
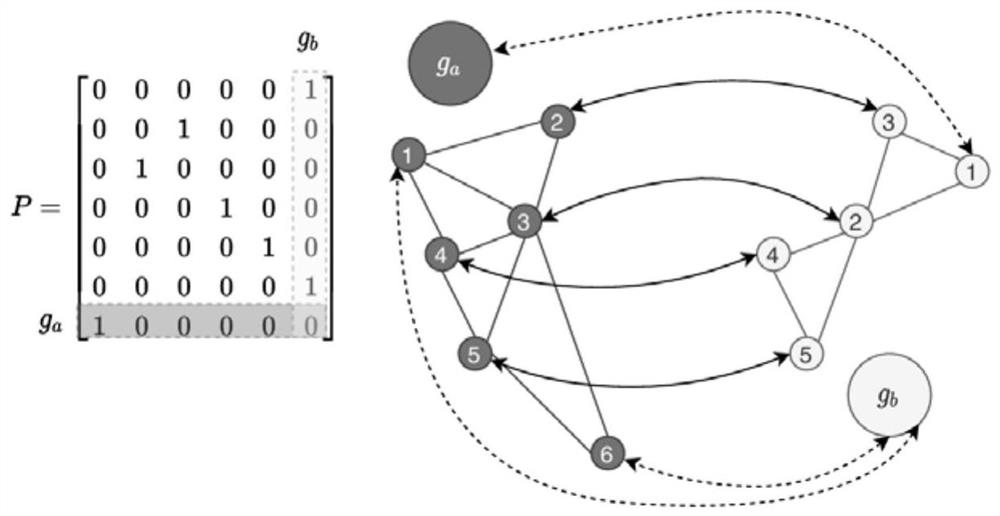
[0063] S4: Introduce the transmission cost matrix to construct the optimal transmission objective function, construct an augmented node to remove outliers, perform negative entropy regularization on the optimal transmission ...
Embodiment 2
[0067] More specifically, on the basis of Example 1, each step is further described.
[0068] More specifically, the step S1 includes the following steps:
[0069] S11: Perform Gaussian blurring on the raster map to be spliced to filter the edge noise of the raster map and make the edge of the binary image generate a continuous and smooth gradient;
[0070] S12: Extract multi-scale FAST key points and extract BRIEF feature descriptors.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More