

Soft robot state feedback control method based on dielectric elastomer actuator
A dielectric elastomer and state feedback technology, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of few research results and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to make the purpose, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
[0048] 1. Summary of technical solutions of the present invention
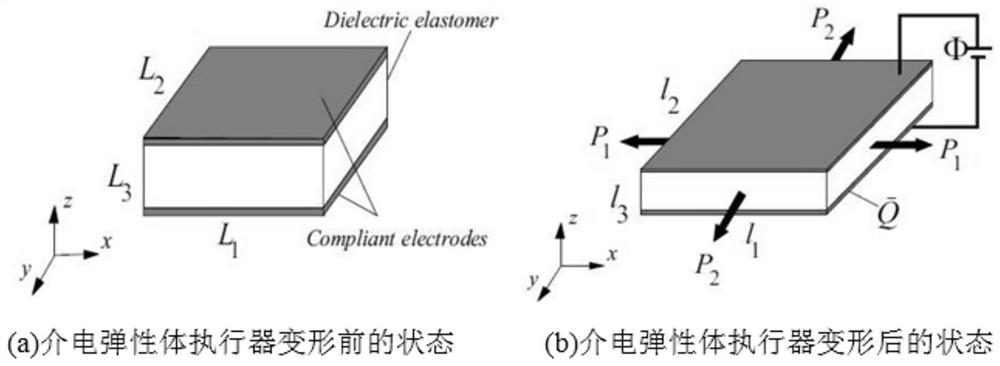
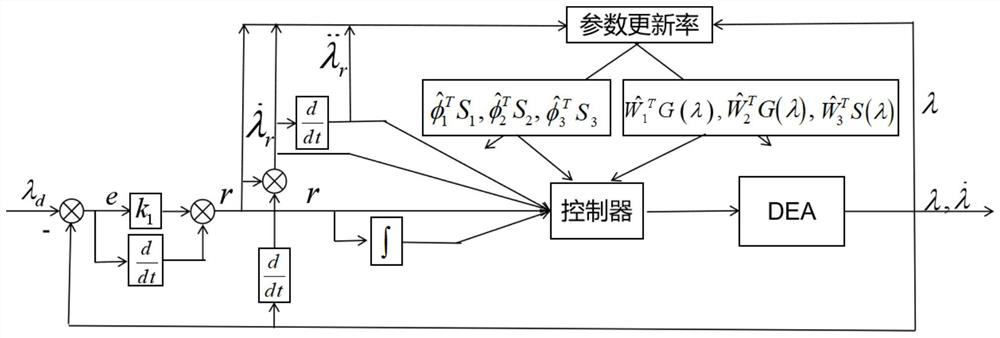
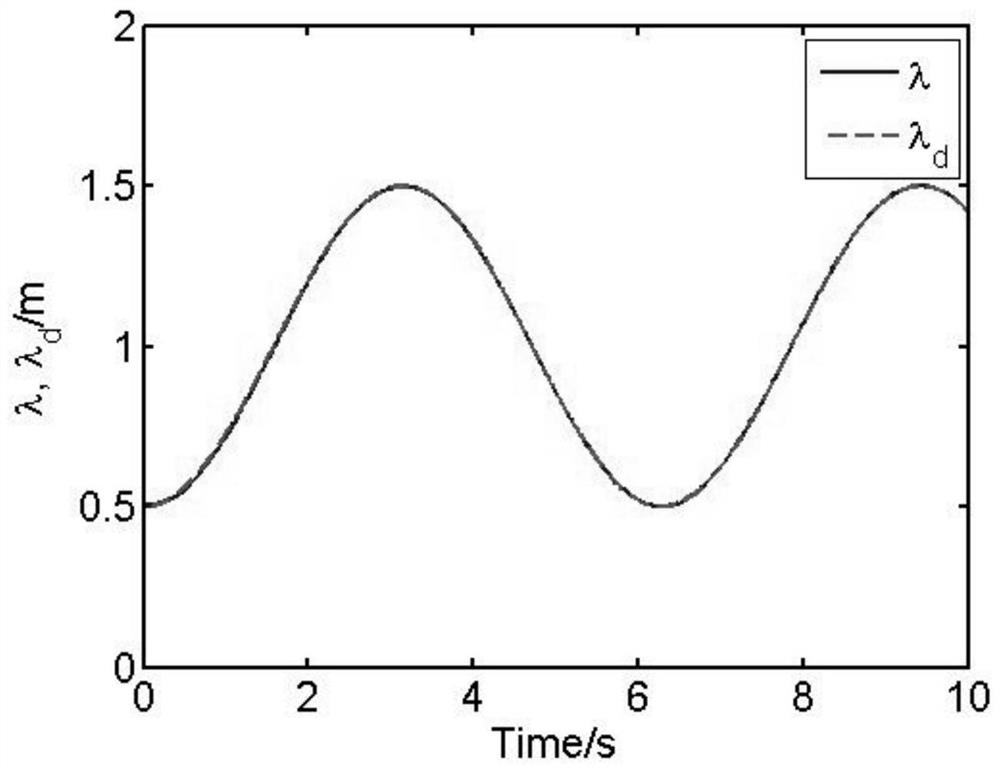
[0049] The state feedback control method of the soft robot based on the dielectric elastomer actuator proposed by the present invention, the main idea is to use the radial basis function neural network (RBF NN) to target the trajectory tracking control task of the soft robot with the dielectric elastomer as the actuator, Study the design problem of intelligent controller with state feedback. First of all, in order to realize the controller design of the dielectric elastomer actuator system, it is necessary to establish a dynamic control model of the dielectric elastomer actuator by means of virtual work simulation. This model uses the Gent model to describe the elasticity of the dielectric elasto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More