

Method for accurately detecting position of low-speed small unmanned aerial vehicle through radar photoelectric cooperation
An unmanned aerial vehicle, low-slow and small technology, applied in the field of unmanned aerial vehicle detection, can solve the problem of low positioning accuracy of unmanned aerial vehicles, and achieve the effect of good maneuverability, reduced error and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
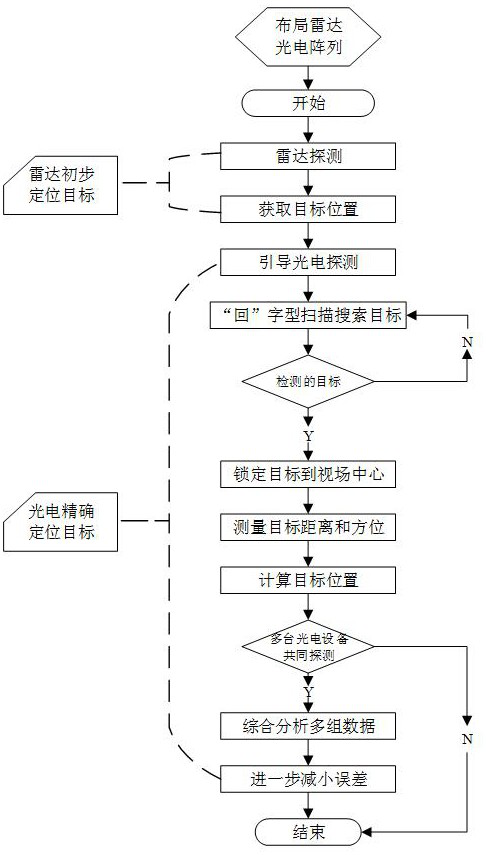
[0040] Such as figure 1 As shown, the radar-optical collaborative method for accurately detecting the position of "low, slow and small" unmanned aerial vehicles includes the following steps:
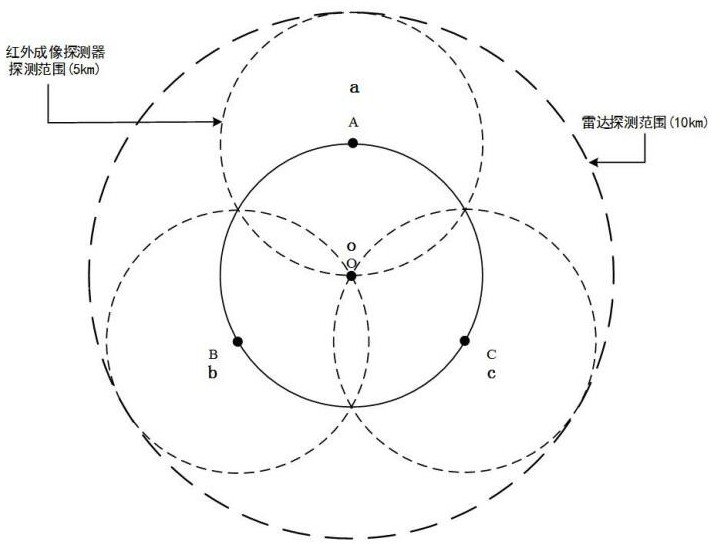
[0041] Step S1. Combining the detection performance and detection methods of radar and photoelectric equipment, arrange them in a certain array on urban high-rise buildings, so as to realize the monitoring of large-scale urban areas.
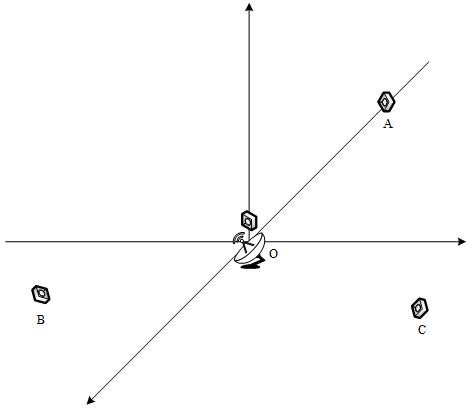
[0042] Step S2. Establish a cooperative detection space Cartesian coordinate system, use radar to initially detect the position of the UAV in the urban building complex, and select the corresponding photoelectric device for subsequent operations according to the position.
[0043]Step S3. According to the target position information detected by the radar, adjust the observation direction and angle of the photoelectric equipment so that the staring field of view is near the target, and then scan and search and capture the target.
[0044] Step S4. After ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More