

Intelligent setting method for unmanned aerial vehicle attitude control parameters based on quantum firefly algorithm
A firefly algorithm and parameter tuning technology, which is applied in the field of intelligent tuning of UAV attitude control parameters based on the quantum firefly algorithm, can solve problems such as reduced convergence speed, falling into local optimum, and low accuracy of optimization convergence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0110] Example 1 uses the test function to verify the solution accuracy and convergence of the quantum firefly algorithm
[0111] In order to verify the improvement effect of the improved algorithm in terms of solution accuracy and convergence, the standard test functions Rosenbrock function and Rastrigin function were selected to compare the effect of the algorithm before and after the improvement. The function is Y=f(X)=-g h (X)h=Rosenbrock, Rastrigin, the mathematical expressions and global optimal solutions of the two functions are given in Table 1.
[0112] Suppose there are N quantum fireflies in the quantum firefly group, F=(X Q1 ,X Q2 ,...,X Qi ,...,X QN ), 1≤i≤N, the state X of each individual quantum firefly Q Parameter X of available test functions Q =(θ 1 ,θ 2 ) is the optimization design variable; [Down k ,Up k ] is the optimization range of the kth design variable, Up k is the range upper bound, Down k is the lower bound of the range; X Qi =(θ 1i ,θ...
Embodiment 2
[0132] Example 2 Feasibility verification of parameter tuning of quadrotor UAV by quantum firefly algorithm
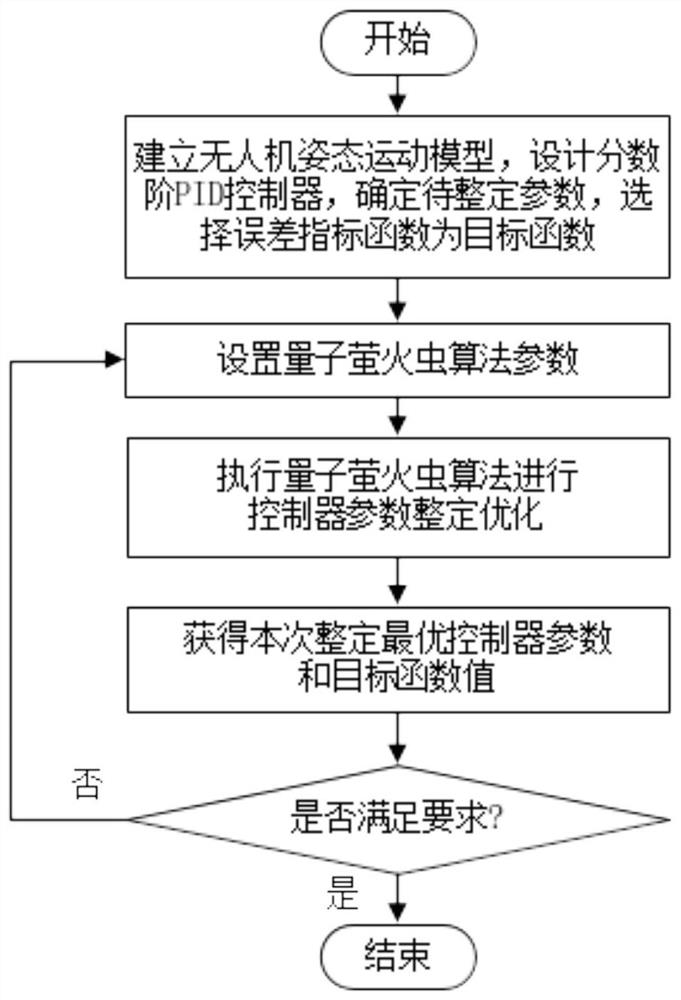
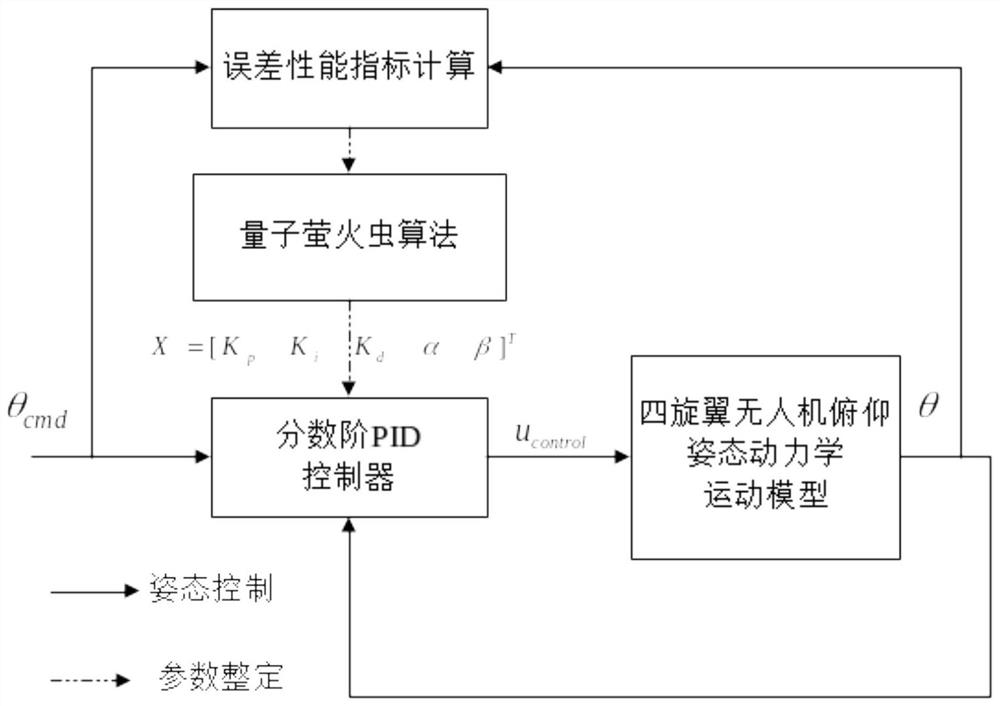
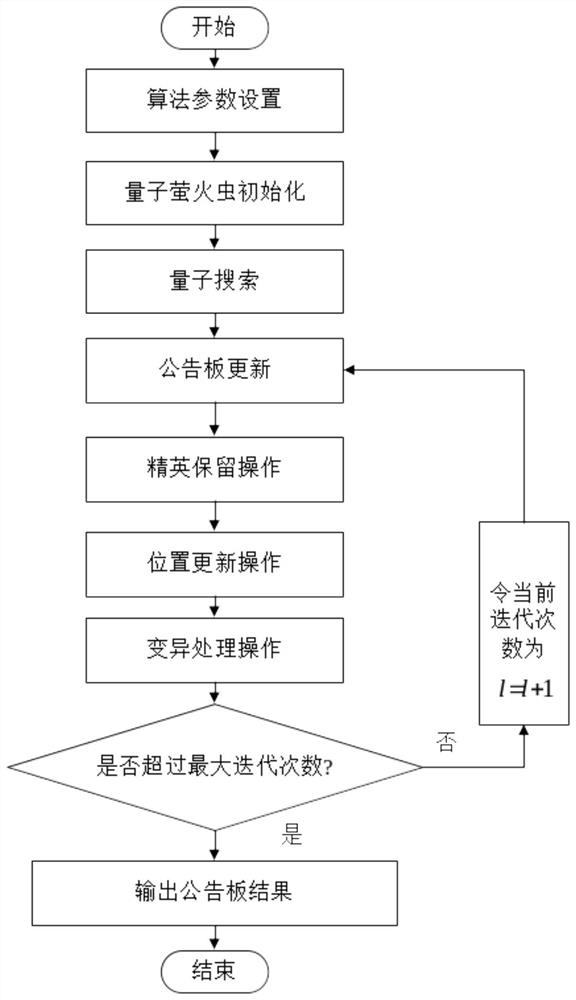
[0133] Refer to attached Figure 1-7 , the specific implementation steps of the inventive method are as follows:
[0134] Step 1. Establish a typical quadrotor UAV pitch attitude kinematics model as follows:
[0135]
[0136] In the formula, p is the rolling angular velocity of the UAV; q is the pitching angular velocity of the UAV; is the pitch angular acceleration of the UAV; r is the yaw angular velocity of the UAV; I y is the moment of inertia of the UAV on the y-axis; τ y is the moment of the UAV on the y-axis;
[0137] The moment of inertia of a certain type of quadrotor aircraft is: I x =0.045kgm 2 , I y =0.06kgm 2 , I z =0.083kgm 2
[0138] p=0.06cos(0.3t)rad / s, r=0.04cos(0.6t)rad / s
[0139] Transform formula (1) into the integral chain model form of formula (2):
[0140]
[0141] In the formula, x 1 = θ is the pitch angle of the UAV.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More