

Method for positioning engine valve grabbing point
A technology of engine valve and positioning method, which is applied in image data processing, instrumentation, calculation, etc., can solve problems such as difficult separation of point cloud, incorrect positioning of grabbing points, and lack of quality of point cloud at the top of the valve, so as to ensure accuracy, Guaranteed consistent effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
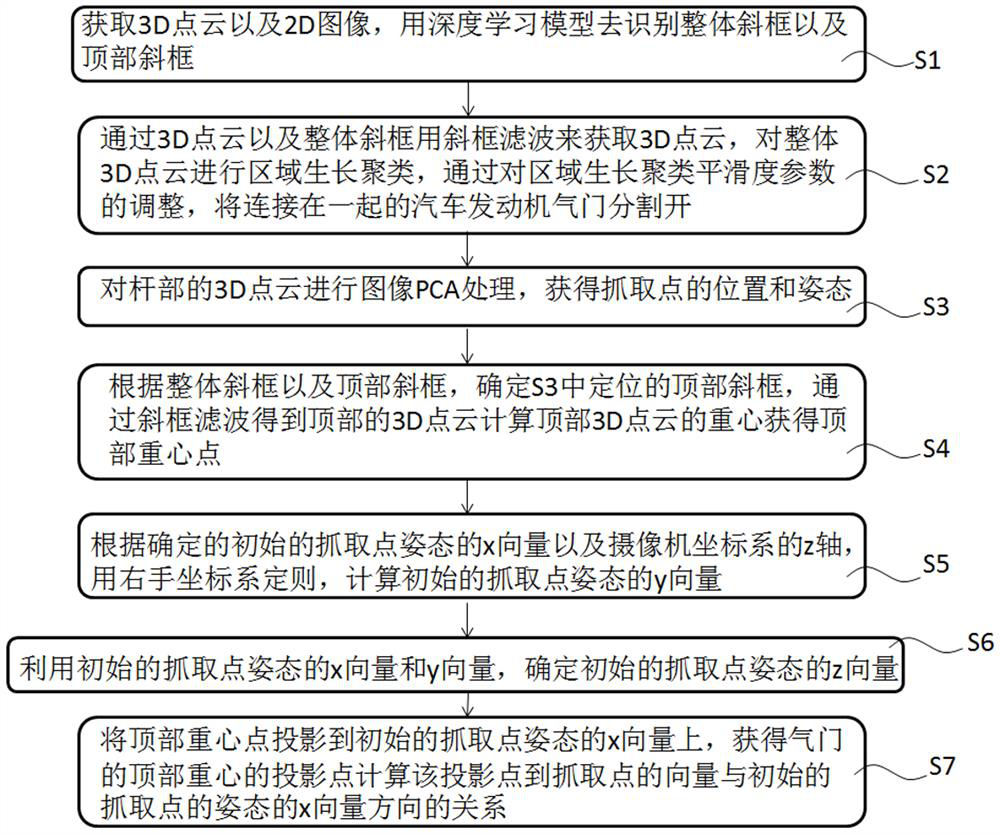
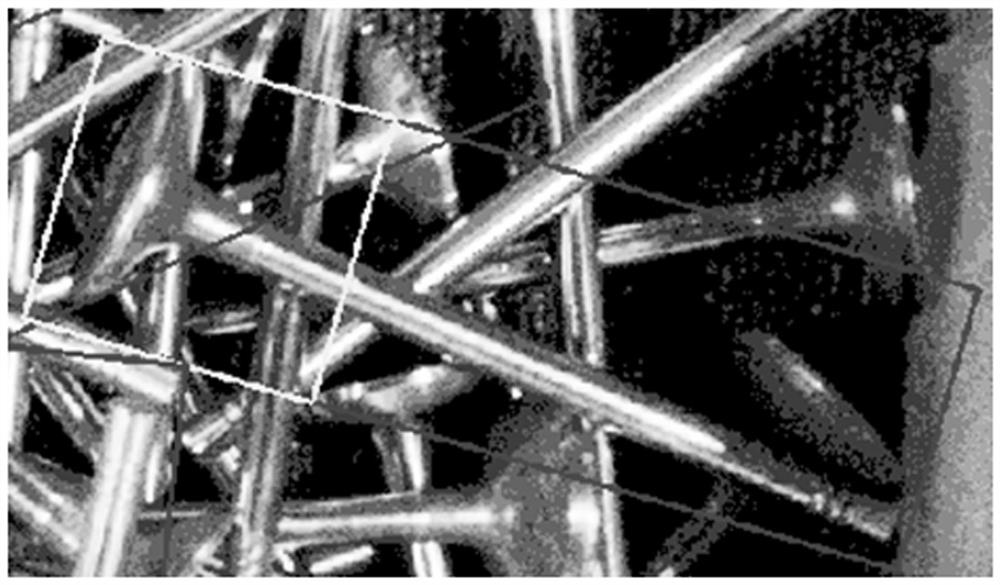
[0038] A 3D camera is used to collect 3D point clouds and 2D images of automobile engine valves, and the 2D images are recognized by a model trained with 600 2D images of automobile engine valves to obtain the overall oblique frame of the automobile engine valve and the top oblique frame of the automobile engine valve (such as image 3 shown), the 3D point cloud is combined with the overall oblique frame of the automobile engine valve to obtain the overall 3D point cloud of the valve through oblique frame filtering (such as Figure 4 shown), using region growing clustering for segmentation, where the smoothness threshold is set to 4°, the segmented car engine valve stem (such as Figure 5 As shown), it can be seen that the stem part of the car engine valve is relatively complete through the segmentation of the region growth cluster, and the 3D point cloud of other interference car engine valves and the 3D point cloud of the top of the car engine valve are segmented.
[0039] T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More