

Database machine room complex path planning system and planning method thereof
A technology for planning systems and complex paths, applied in control/regulation systems, vehicle position/route/height control, non-electric variable control, etc., can solve the problem of unpredictable global information, path deviation in path planning, and aggravate the operation of path planning systems Load and other problems, to improve the local search ability and global convergence speed, reduce local cross paths, and improve the effect of preliminary obstacle avoidance ability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
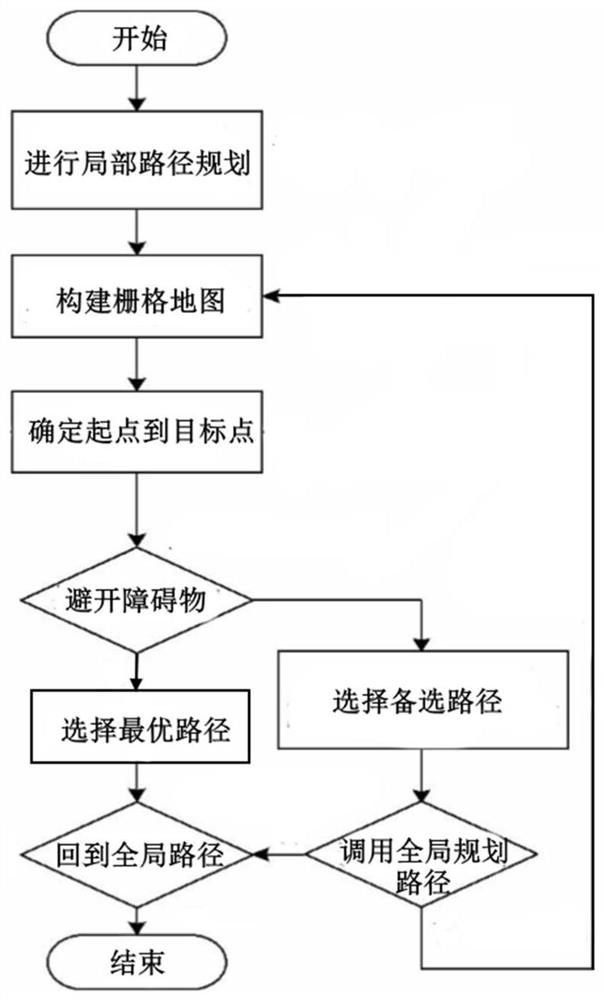
[0052] like figure 1 As shown, in this embodiment, a complex path planning system for a database computer room is characterized in that it includes
[0053] According to the known path planning index, find a global path planning system for an optimal collision-free path from the starting point to the target point;
[0054] A local path planning system that enables the robot to have good obstacle avoidance capabilities by detecting the path environment through multiple sensors;
[0055] A hybrid path planning system that combines a global path planning system and a local path planning system.
[0056] In a further embodiment, the global path planning system finds an optimal collision-free path from the starting point to the target point according to the path planning index when the environmental information is known, and for the existing path planning calculation, according to The environment in which the robot is located selects an appropriate calculation method so that the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More