Human-hand-imitated prostate particle implantation robot and using method thereof
A technology imitating the human hand and the prostate is applied in the field of prostate particle implantation robots, which can solve the problems of difficult, flexible and multi-posture needle insertion tasks, and the inability to perform flexible obstacle avoidance tasks, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
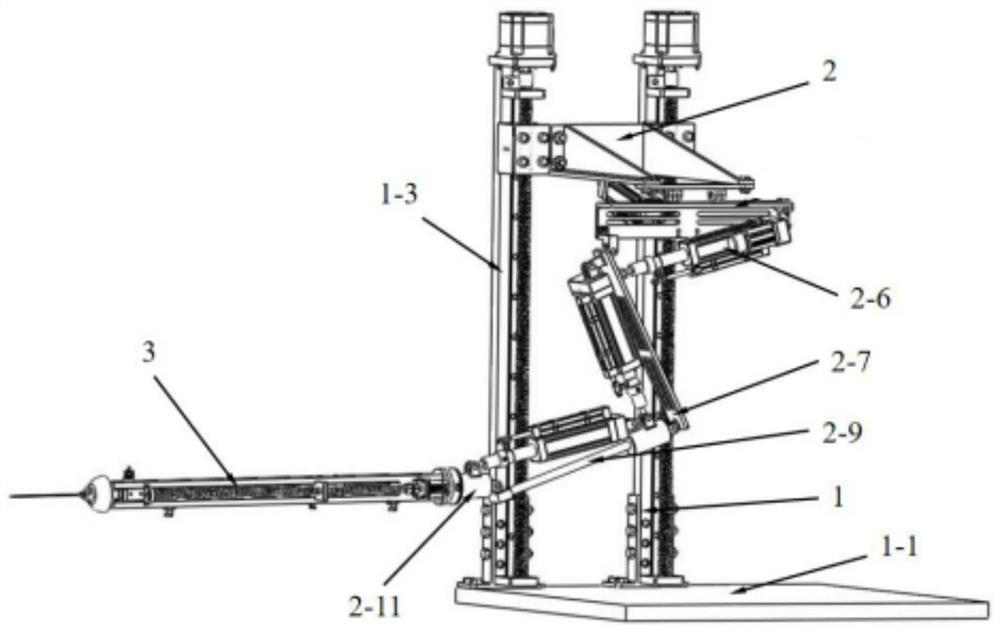
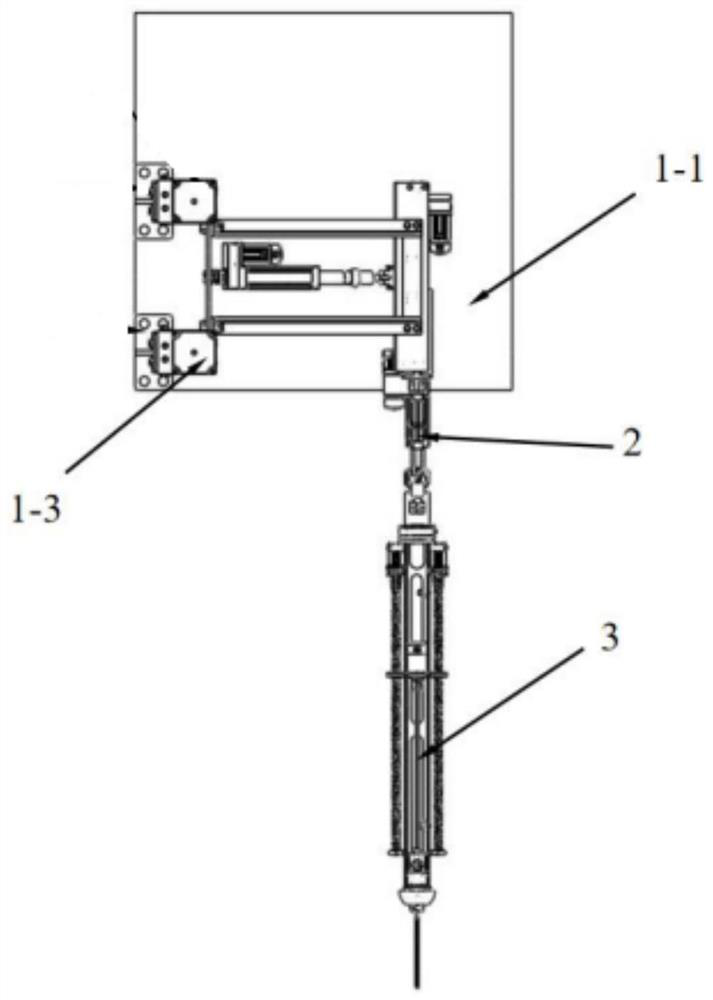
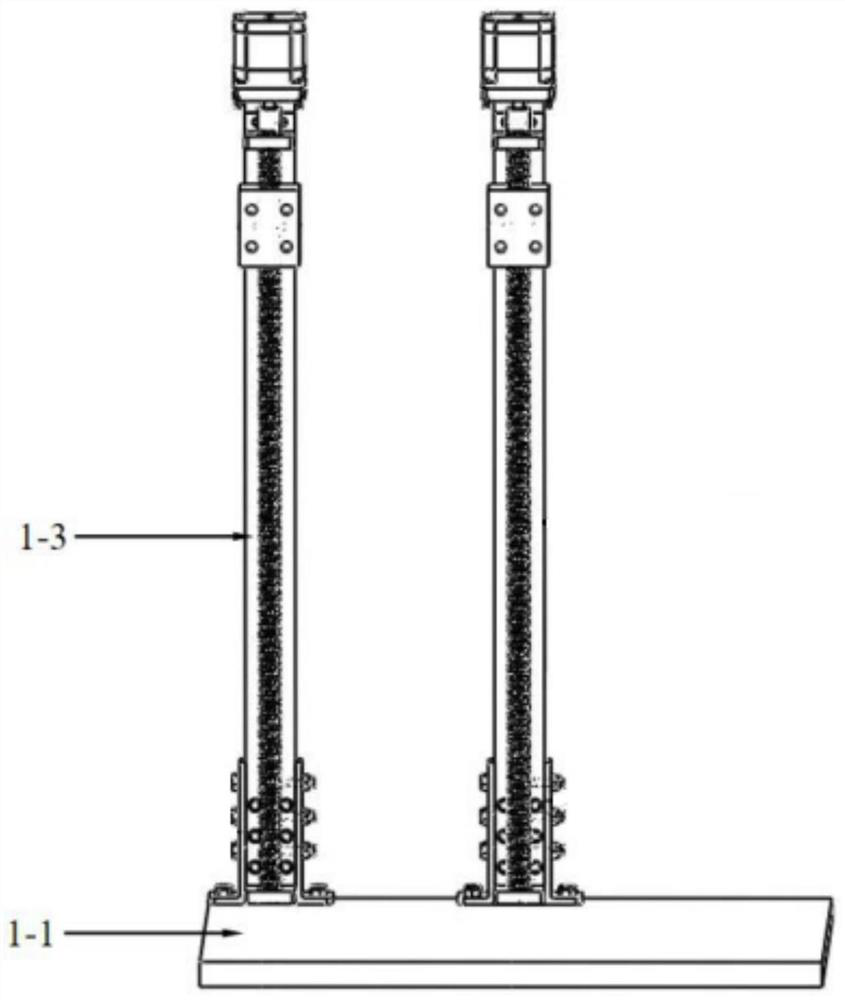
[0037] Specific implementation mode one: combine Figure 1-9 Describe this embodiment, a human-like prostate particle implantation robot, which includes a mounting frame 1, a humanoid robotic arm 2 sliding up and down on the mounting frame 1, and a particle implantation mechanism installed at the end of the humanoid robotic arm 2 3. The humanoid mechanical arm 2 includes first to fourth kinematic mechanisms that are sequentially articulated, and each kinematic mechanism is equipped with a single-dimensional force sensor 2-6-3 and a displacement sensor 2-6-5. A six-dimensional force sensor 2-12 is installed between the entry mechanism 3 and the end of the humanoid mechanical arm 2, and the movement of the humanoid arm is performed through the first to fourth motion mechanisms;
[0038]The particle implantation mechanism 3 includes a main frame 3-1, a puncture assembly 3-7 and an inner needle assembly 3-4, wherein the puncture assembly 3-7 and the fourth movement mechanism pass ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com