

Manipulator locating, guiding and calibrating method based on machine vision cooperation
A technology of machine vision and calibration method, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of complex calibration process, high precision requirements of calibration blocks, and difficult to complete calibration, etc., and achieve the effect of simple calibration process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020]The present invention will be described in detail below with reference to the drawings.
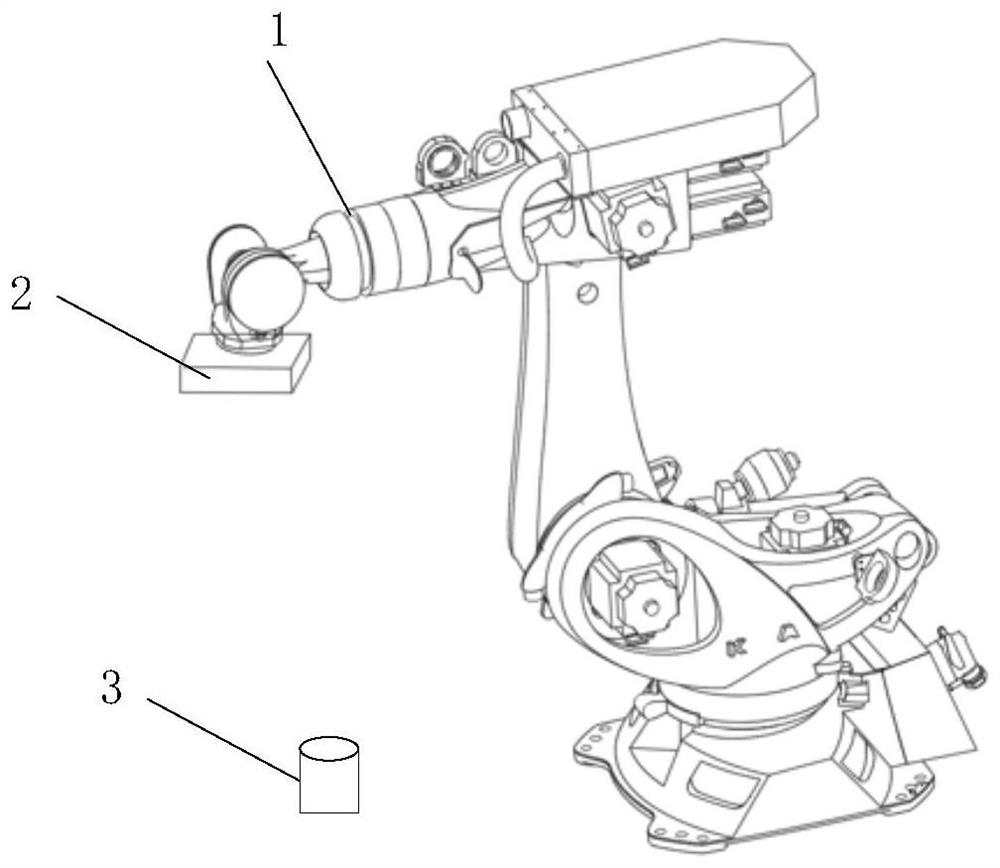
[0021]The present invention relates to a visual system positioning guidance calibration method, and the visual system used includes a controller, a camera with a lens, and a light source.
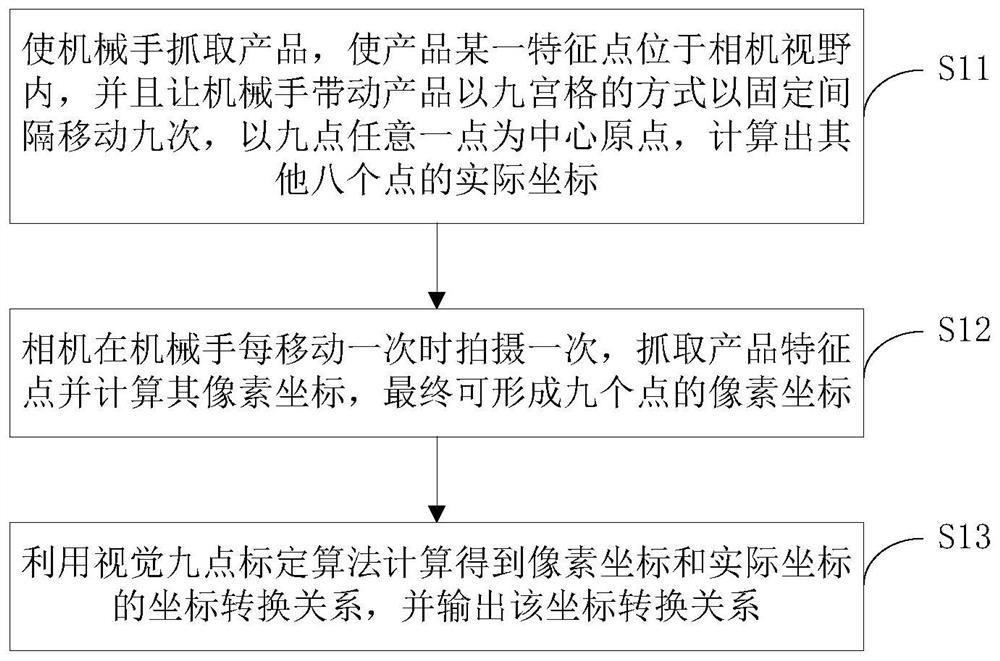
[0022]Combined referencefigure 1 The calibration method of the present invention based on the machine-based visual mating robot is included in the following steps:
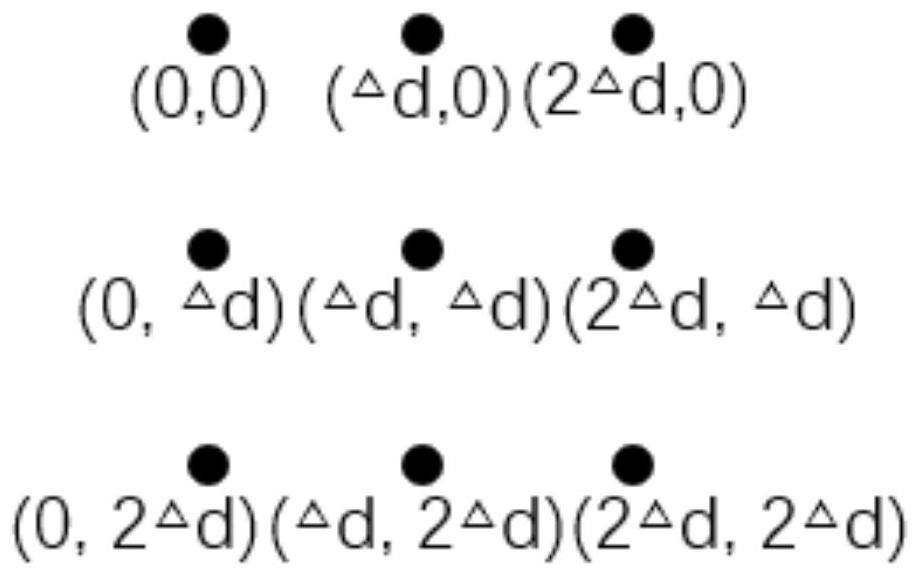
[0023]S11, using a robot to grab the product, enabling a characteristic point in the camera in the camera, and allows the robot to move the product in a nine-rich manner, the moving distance is △ D, at nine o'clock as the center origin, calculate other The actual coordinates of eight points;
[0024]S12, the camera captures the characteristics of the characteristics and calculates the pixel coordinates of the product when the robot is moved once, grab the product feature point and calculate its pixel coordinates.
[0025]S13, using the visual nine-point ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More