

Neural network PID steering control method for hydrostatic drive tracked vehicle
A neural network and steering control technology, applied in the field of vehicle steering, can solve the problems of unstable steering process, poor trajectory controllability, slow response speed, etc., and achieve the effects of good tracking, suppression of overshoot, and accurate and rapid steering.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
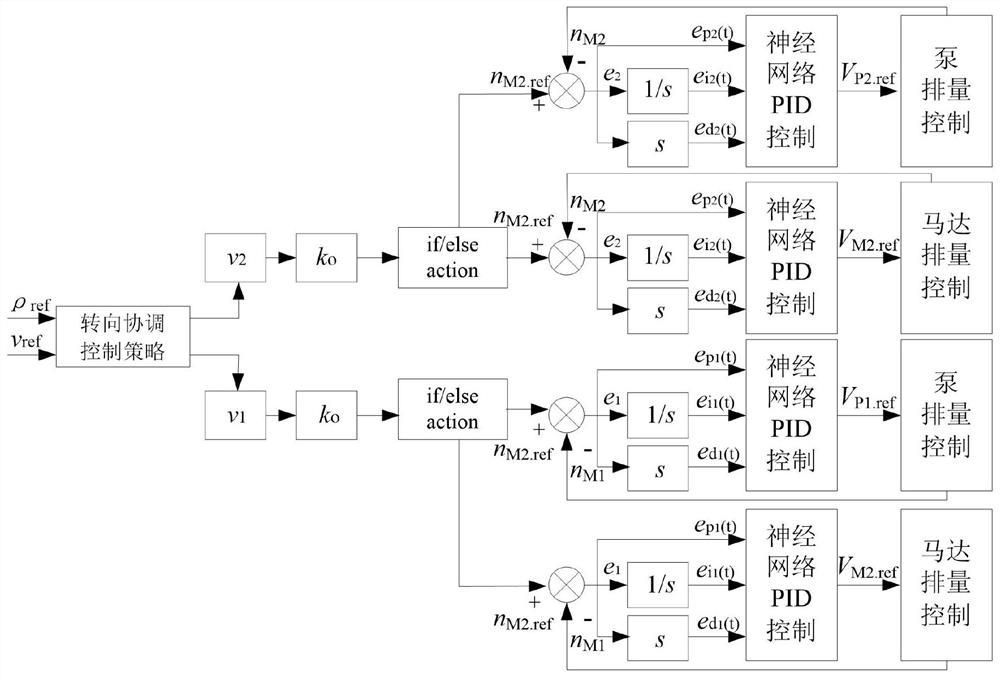
[0040] see Figure 1-4 , the invention provides the technical scheme of the neural network PID steering control method of the hydrostatically driven crawler vehicle:
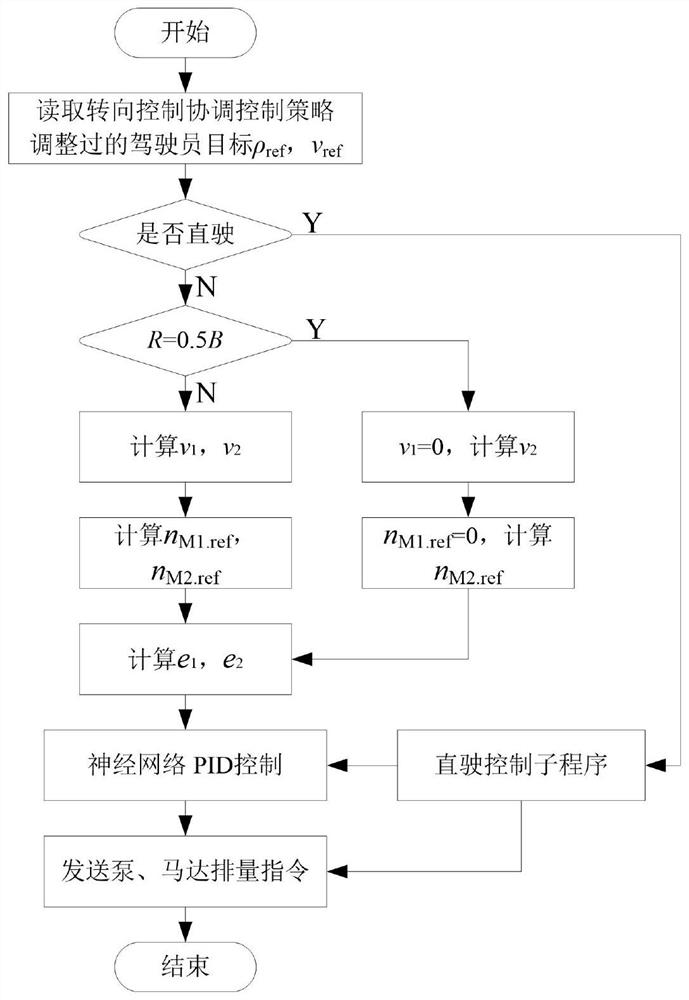
[0041] according to Figure 1-4 shown, including the following steps:
[0042] S1: Read the driver's target relative steering radius ρref and target vehicle speed vref adjusted by the steering control coordination control strategy;
[0043] S2: Judging whether the driver’s vehicle is driving ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More