

Road bayonet vehicle position detection method
A detection method and vehicle technology, applied in the direction of neural learning methods, instruments, biological neural network models, etc., can solve problems such as the influence of traffic efficiency, failure to trigger verification tasks, missed detection, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
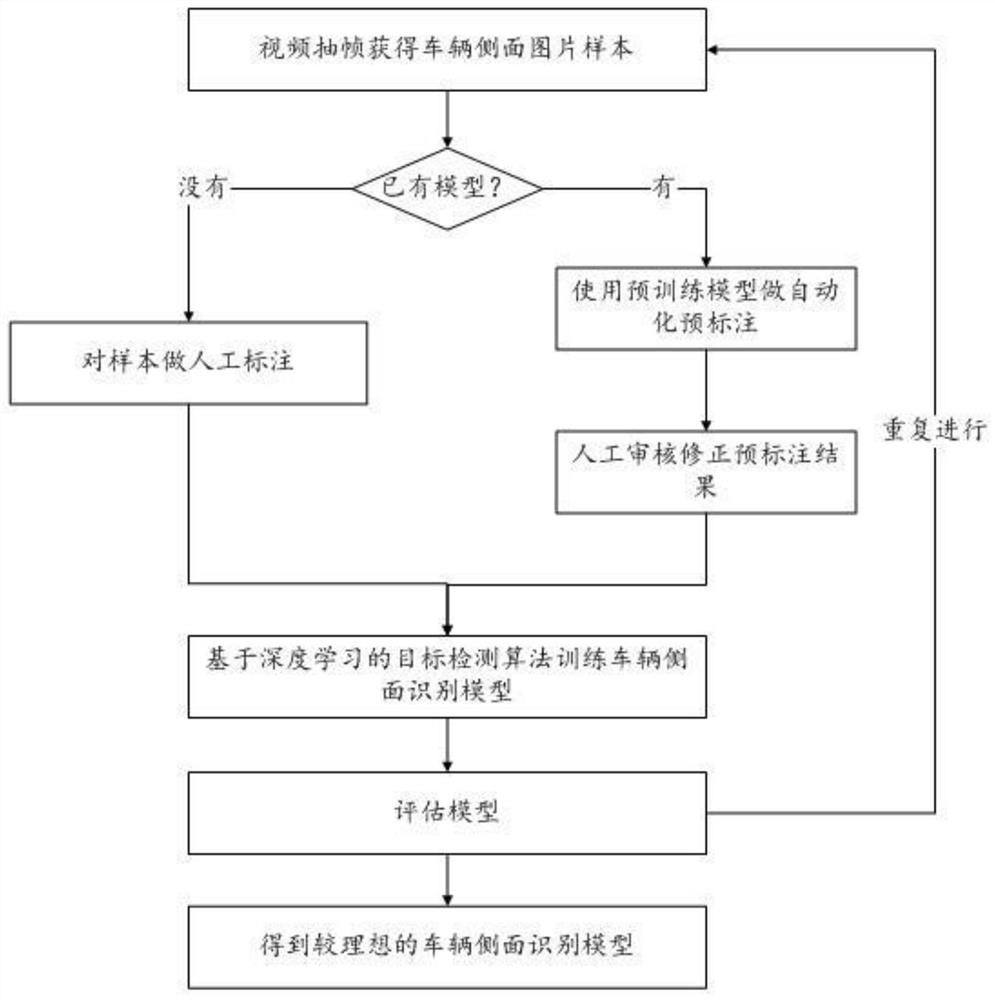
[0080] see Figure 1 to Figure 5 , the present invention provides a vehicle position detection method at a road bayonet, which uses a target detection algorithm based on deep learning to carry out targeted training on vehicle side pictures to obtain a vehicle side recognition model, and cooperates with a camera installed on the side of the verification area (generally Use the left rear camera) to accurately identify the coordinate position of the vehicle in the screen in real time in the video, which can be represented by a quintuple (left, top, width, height, confidence), which are the x coordinates of the vehicle rectangle on the left side of the screen, Top y-coordinate, width, height and confidence. The training process of the vehicle side recognition model, such as figure 1 The training flow chart of the vehicle side recognition model is shown as follows: firstly, the vehicle side image sample is obtained by sampling video frames; the samples are manually marked or the p...
Embodiment 2
[0103] see Image 6 , taking the implementation of the trolley lane as an example:
[0104] Step 1: If Image 6 As shown in the schematic diagram of the installation and deployment of the trolley lane, install the front-end equipment:
[0105] Plan the lane range and the verification waiting area according to the standard lane width. A vehicle capture camera 3 is installed right in front of the driveway. A set of boxes are installed on both sides of the lane waiting area, and 4 face capture cameras 4 are respectively installed in the box. According to the relative position with the vehicle, they are respectively front left, rear left, front right, and rear right cameras. The functions of each device are as follows:
[0106] 1) Vehicle capture camera 3: capture vehicle photos and analyze the license plate. In this method, use a capture machine that supports the active capture SDK interface.
[0107] 2) 4 face capture cameras 4: Synchronously collect the video of the driver ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More