

Nine-degree-of-freedom robot tightening control method for assembling thin-wall large threaded part
A control method and technology with degrees of freedom, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve problems such as high operator experience requirements, low assembly efficiency, and difficult assembly and tightening control methods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0067] Specific examples are given below to further describe the technical solution of the present invention in a clear, complete and detailed manner. This embodiment is the best embodiment on the premise of the technical solution of the present invention, but the protection scope of the present invention is not limited to the following embodiments.
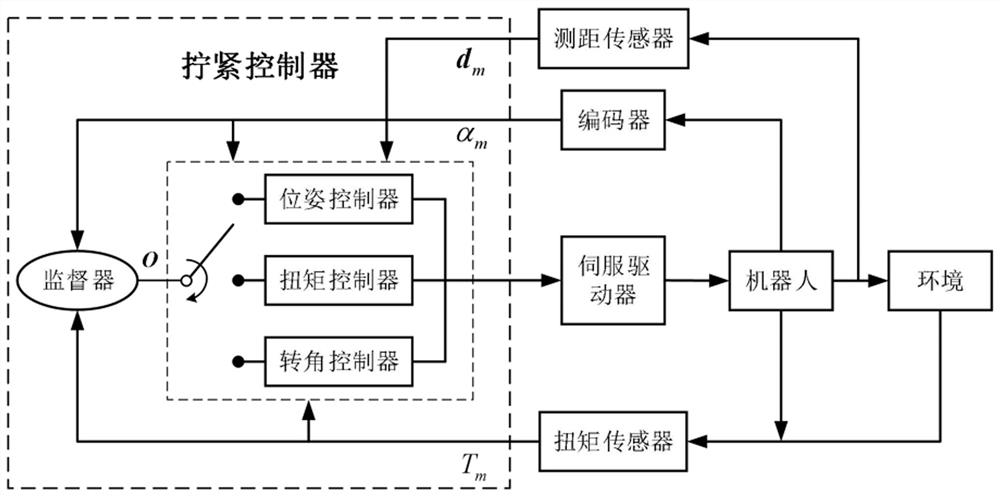
[0068] A nine-degree-of-freedom robot tightening control method for assembling thin-walled large threaded parts. The robot tightening control system includes a tightening controller, a six-degree-of-freedom Stewart platform at the bottom for adjusting the posture of the upper platform tightening mechanism, and a fixed six-degree-of-freedom platform. The three-degree-of-freedom series mechanism on the Stewart platform for tightening control, the rotary motor at the end and fixes the bolts to be assembled, the thin-walled large threaded shell and the linear motor at the front, and the upper and lower platforms are driven by 6 linear...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More