

Helicopter vibration active control method based on self-adaptive harmonic identification frequency response correction
An active control, helicopter technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of reducing control effect, unable to meet the requirements of helicopter vibration level, dependence, etc., to enhance the recognition accuracy, avoid control The effect of falling
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The drawings constituting a part of the present invention are used to provide a further understanding of the present invention, and the schematic embodiments and descriptions of the present invention are used to explain the present invention, and do not constitute an improper limitation of the present invention.
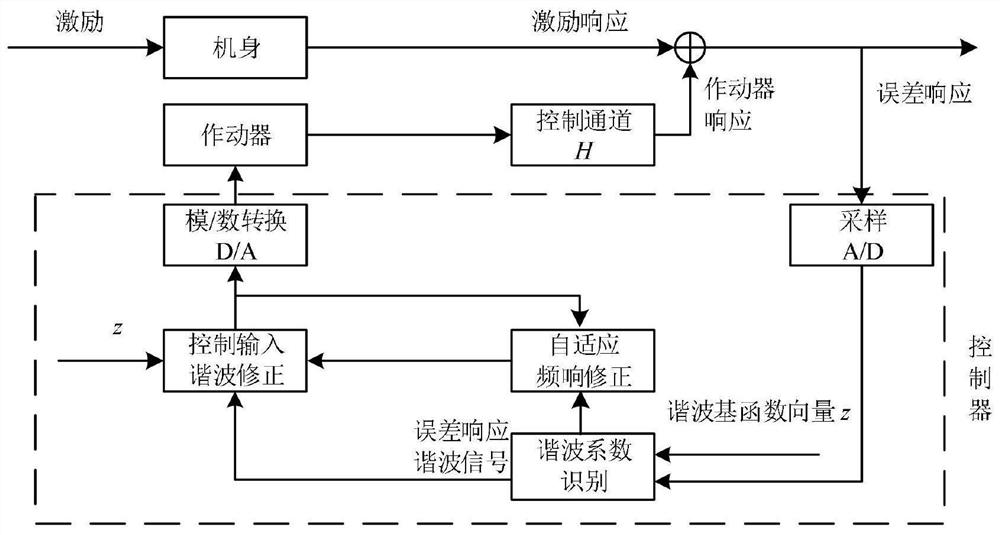
[0039] Such as figure 1 The embodiment shown here provides an active control method for helicopter vibration based on adaptive harmonic recognition and frequency response correction, specifically:
[0040] S1. The actuator is installed on the helicopter body structure to drive the body to generate a control response, and the sensor is arranged at the vibration control target point to collect the vibration response of the control target point; according to the vibration response of the helicopter under no-vibration control, the rotor Determine the harmonic order I of the control signal input to the actuator by the magnitude of the frequency c , to initialize t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More