

Horizontal transportation task AGV dynamic time estimation method
A technology of horizontal transportation and dynamic time, applied in neural learning methods, forecasting, instruments, etc., can solve problems such as large deviation, idle resource efficiency, low efficiency, etc., and achieve the effect of improving the results of time prediction
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
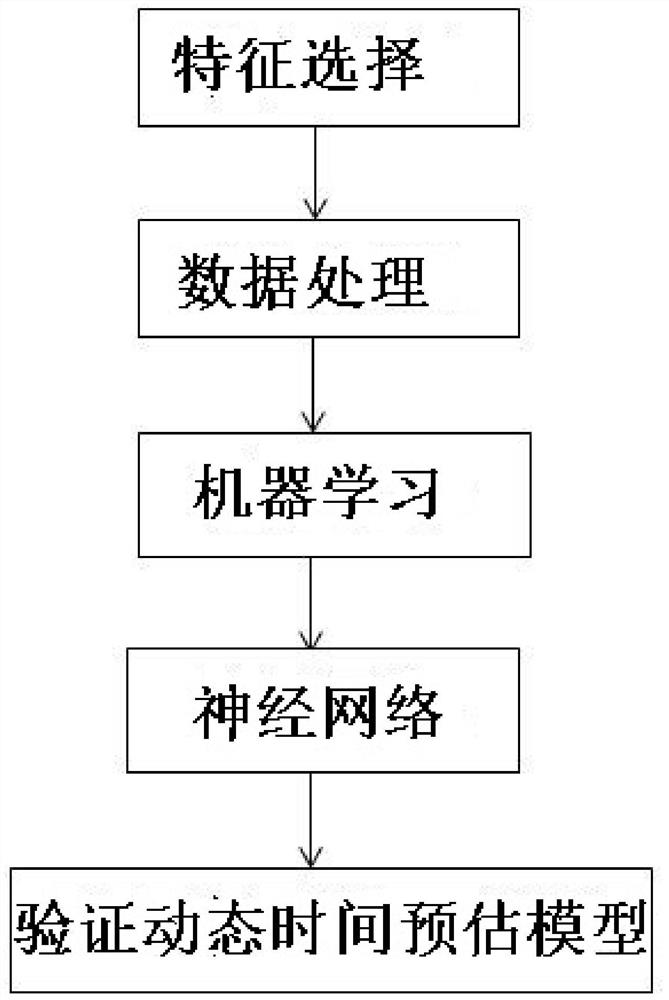
[0049] figure 1 Shown is the flow chart of the method for predicting the dynamic time of the horizontal transport task AGV of the present invention. In combination with its path, characteristics, traffic conditions in the field, etc., the method for predicting the dynamic time of the horizontal transport task AGV is specifically divided into the following steps: figure 1 Shown:
[0050]Step 1: feature selection: use computer program algorithm to select and screen the features of AGV operation instructions for horizontal transportation tasks, and integrate feature data;
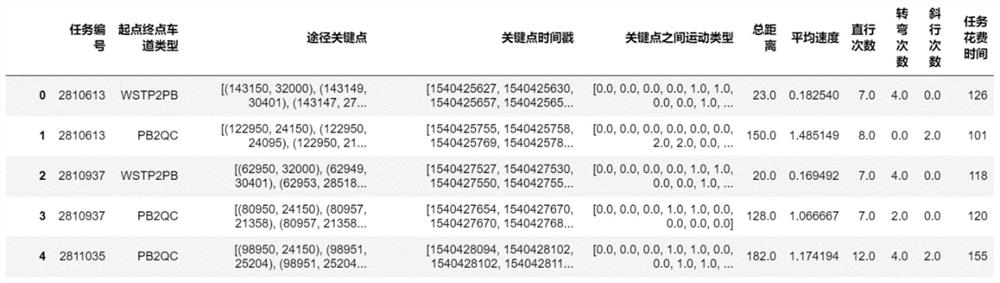
[0051] figure 2 A screenshot showing data extraction processing order (sequence) table; image 3 A screenshot showing data extraction processing the track table; Figure 4 A screenshot of the data table after feature extraction is shown;
[0052] Wherein: the feature selection in step 1 includes the following steps:
[0053] S11: Process the data in the order table such as figure 2 As shown, the record...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More