

Mobile robot positioning method and system based on instance segmentation and multi-sensor fusion, and medium
A multi-sensor fusion, mobile robot technology, applied in the direction of instruments, image analysis, surveying and navigation, etc., can solve the problems of robot positioning error and positioning failure, and achieve accurate positioning data, high precision, and more robust positioning Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
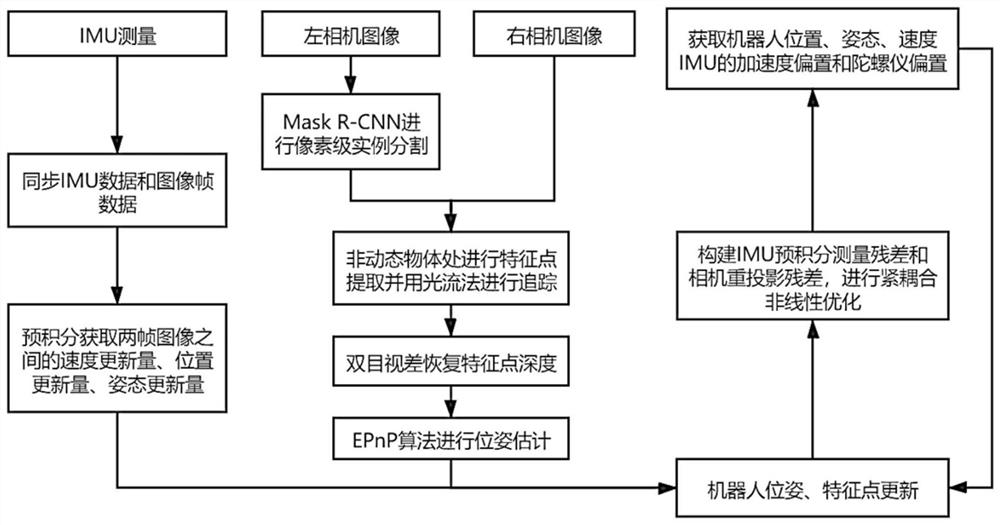
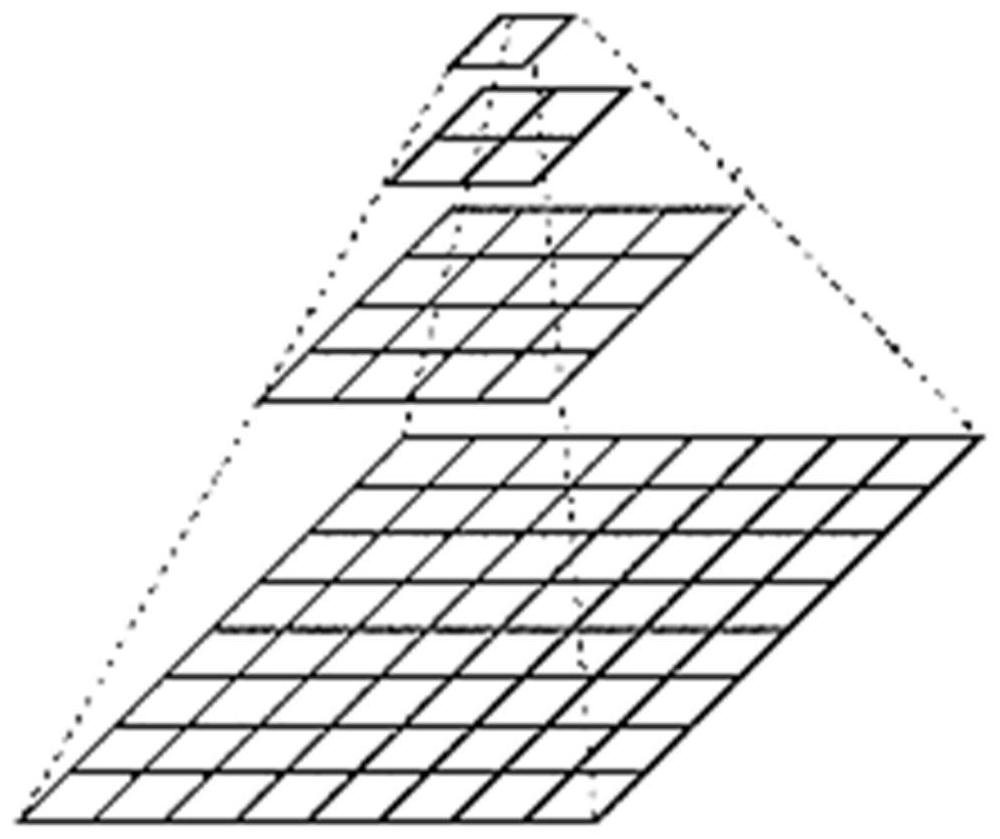
[0068]Mask R-CNN has become one of the most important neural networks in the field of target detection and instance segmentation. Maskr-CNN is generally improved from FASTER R-CNN, but it replaces the VGG network used by FASTER R-CNN, use The RES NET residual neural network of the feature extraction capabilities is the backbone network. MASK R-CNN performs CONCAT operations for a feature map of different scales, and the fixed size of the ROI Align operation, the Mask ROM is operated, and the network is entered into the network. The network is divided into three parts, part of the full-connection network of predicting categories, part of the full connection network of the forecast boundary box, part of which is to predict the full consolidation neural network of Mask, which is parallel structure. After obtaining the predicted results of Mask R-CNN, neural networks can be trained according to prediction results and actual results.
[0069]Multi-Sensor Information Fusion, MSIF, is to use ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More