Calibration method and electronic equipment of camera internal reference and camera relative lidar external reference
A laser radar and calibration method technology, applied in the field of computer vision, can solve the problems of time-consuming and labor-intensive, large external parameter calibration errors, etc., to achieve the effect of improving accuracy, eliminating wrong matching, and saving time and effort in calibration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0044] In order to make the object, technical solution and advantages of the present invention more clear and definite, the present invention will be further described in detail below with reference to the accompanying drawings and examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0045] It should be noted that if there is a directional indication (such as up, down, left, right, front, back...) in the embodiment of the present invention, the directional indication is only used to explain the position in a certain posture (as shown in the accompanying drawing). If the specific posture changes, the directional indication will also change accordingly.
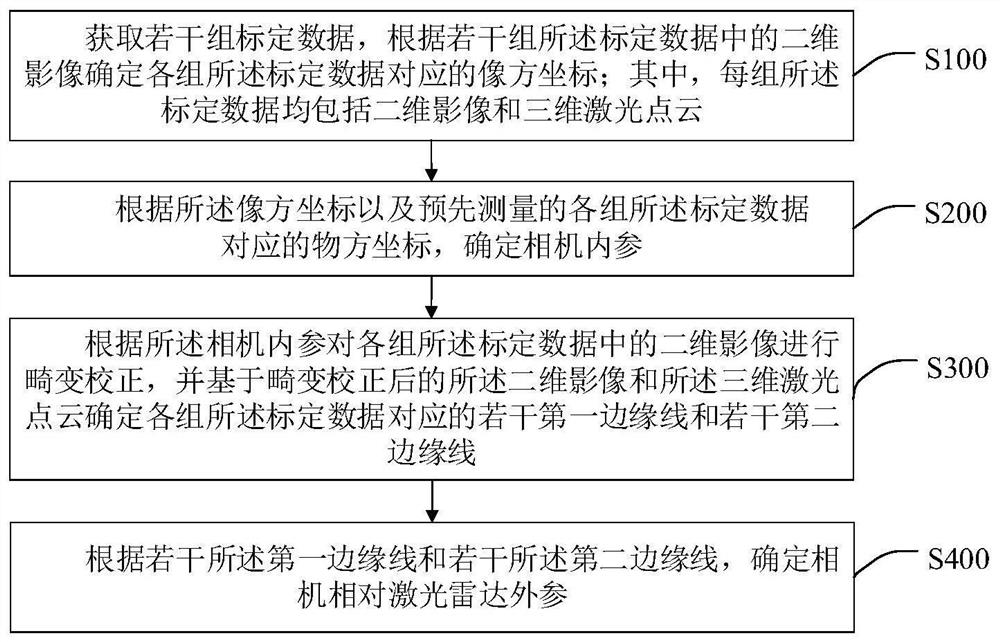
[0046]During the fusion process of the camera image and the lidar point cloud, it is necessary to know the coordinate system of the camera internal reference and the camera relative to the lidar external reference to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More