

Wind power plant unmanned aerial vehicle automatic inspection system and method based on LoRaWAN positioning technology
A positioning technology and automatic inspection technology, which can be used in services based on location information, services based on specific environments, closed-circuit television systems, etc., which can solve the problems of high power consumption of UAV GPS positioning and short battery life , to improve the inspection level, reduce multi-path transmission, and avoid power consumption.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0052] In order to facilitate the understanding of the present application, the present application will be described more fully below with reference to the relevant drawings. Preferred embodiments of the application are shown in the accompanying drawings. However, the present application can be embodied in many different forms and is not limited to the embodiments described herein. On the contrary, the purpose of providing these embodiments is to make the disclosure of the application more thorough and comprehensive.
[0053] In order to solve the many defects caused by the inspection of the existing artificially operated UAV, the problems of high power consumption of the GPS positioning of the existing UAV and the short battery life of the UAV, the solution provided by this application is: LoRaWAN positioning technology-based Wind farm UAV automatic inspection system and method.
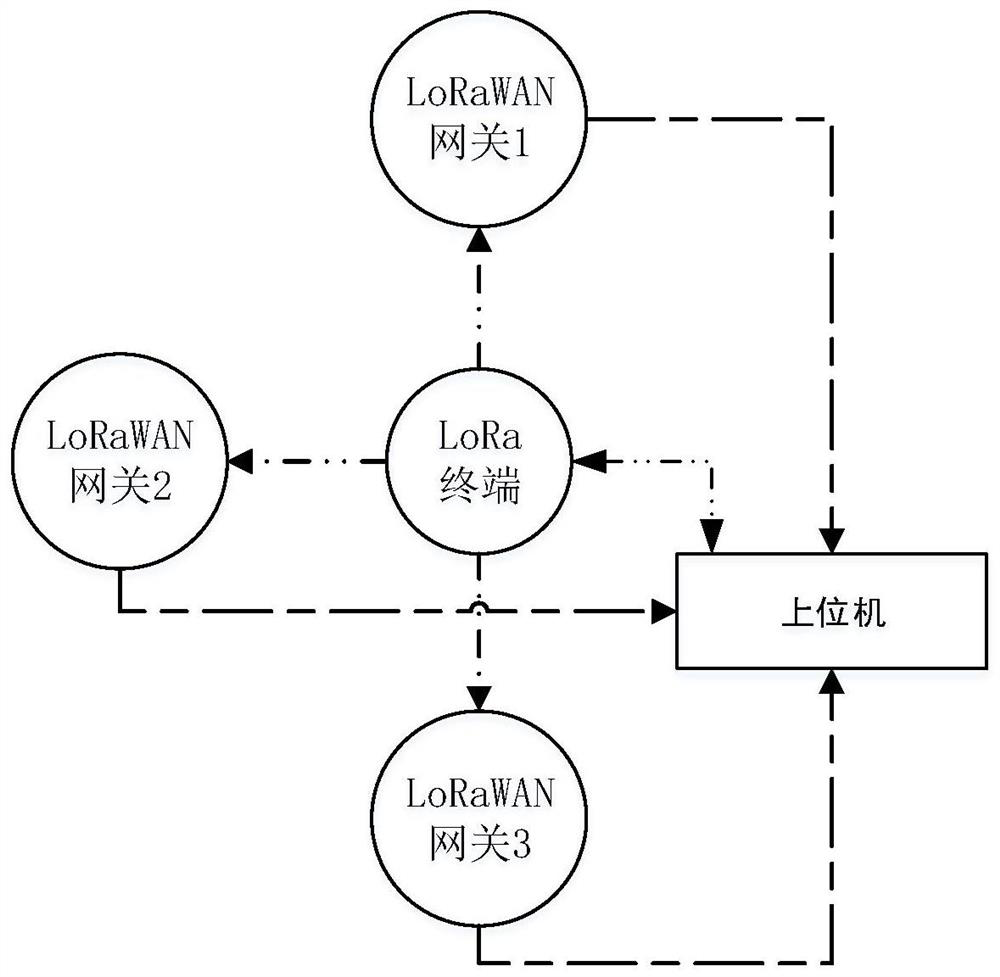
[0054] Such as figure 1 As shown, the wind farm drone automatic inspection system based on L...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More