

Path planning method for minimally invasive surgery soft tissue manipulator
A path planning, minimally invasive surgery technology, applied in surgery, computer-aided planning/modeling, medical science, etc., can solve problems such as adaptability, safety, poor flexibility, human injury, etc., to reduce planning difficulty and flexibility Good results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0024] The objects and functions of the present invention and methods for achieving the objects and functions will be clarified by referring to the exemplary embodiments. However, the present invention is not limited to the exemplary embodiments disclosed below; it can be implemented in various forms. The essence of the description is only to help those skilled in the relevant art comprehensively understand the specific details of the present invention.
[0025] Hereinafter, embodiments of the present invention will be described with reference to the accompanying drawings. In the drawings, the same reference numerals represent the same or similar components, or the same or similar steps.
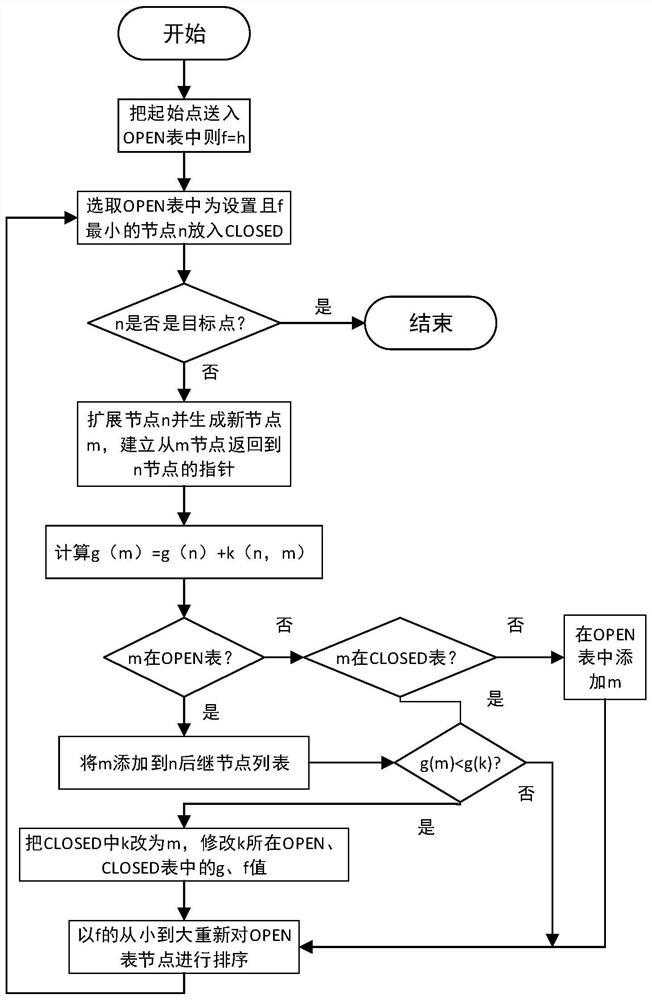
[0026] In order to allow the soft manipulator to accurately reach the lesion area and perform follow-up work without injuring other tissues, it is necessary to analyze the operating path of the soft manipulator to obtain the best solution and then control it through pneumatic drive. To imp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More