

Robot welding assembly method and system based on 2D/3D visual positioning
A robot welding and visual positioning technology, which is applied in welding equipment, auxiliary welding equipment, welding/cutting auxiliary equipment, etc., can solve the problem that robots cannot identify the accurate welding position of parts one by one, cannot guarantee welding stability, and welding quality consistency. Welding quality and welding efficiency are difficult to guarantee, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0061] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
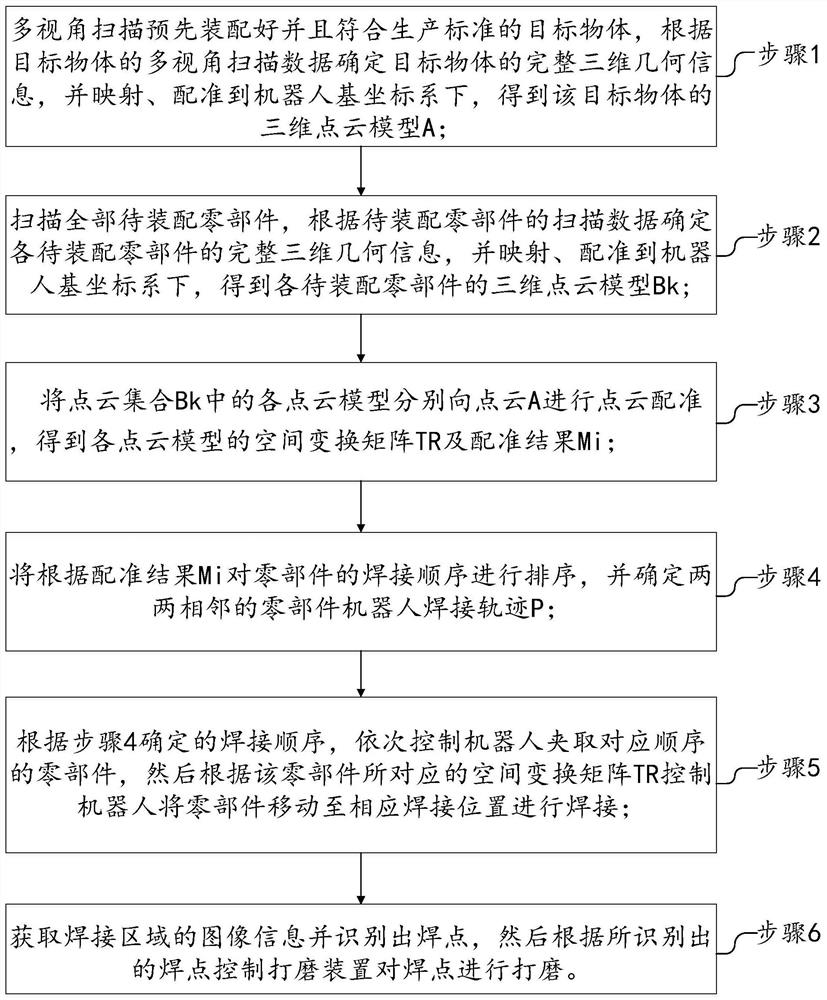
[0062] see figure 1 , the embodiment of the present invention discloses a robot welding assembly method based on 2D / 3D vision positioning, including the following steps:
[0063] Step 1: Multi-view scanning of the pre-assembled target object that meets the production standards, determine the complete 3D geometric information of the target object according to the multi-view scanning data of the target object, and map and register it to the robot base coordinate syst...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More