Vehicle positioning method based on image detection, and vehicle-mounted terminal
A vehicle positioning and image detection technology, which is applied in image analysis, image data processing, instruments, etc., can solve the problems that visual positioning cannot be performed, high-precision maps are difficult, and the effectiveness of visual positioning is low.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
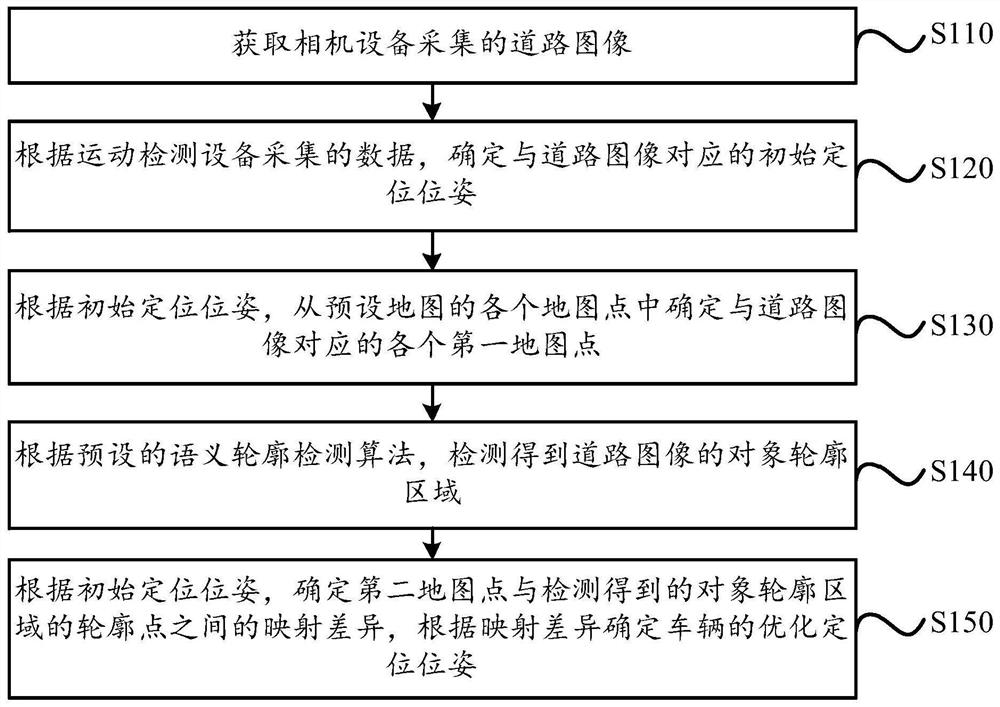
[0136] Embodiment 1: According to the value of the estimated pose, the transformation matrix between the world coordinate system and the camera coordinate system is determined; according to the transformation matrix and the projection relationship between the camera coordinate system and the image coordinate system, each first The map points are mapped to the image coordinate system to obtain the first mapping position of each first map point; the map points whose position difference between the first mapping position and the contour point in each first map point is less than the first preset threshold are taken as For a second map point on the contour of the object, a mapping difference between the first mapped position of the second map point and the contour point is determined.
[0137] When each object outline area is detected from the road image, and the category of each object outline area is also determined, according to the above-mentioned condition that the position di...
Embodiment approach 2
[0142] Embodiment 2: According to the value of the estimated pose, the transformation matrix between the world coordinate system and the camera coordinate system is determined; according to the transformation matrix and the projection relationship between the camera coordinate system and the image coordinate system, the detected contour points are Mapping to the world coordinate system to obtain the second mapping position of the contour point; the map point whose position difference between each first map point and the second mapping position of the contour point is less than the second preset threshold is regarded as being on the object contour A second map point of , determining a mapping difference between the second map point and a second mapped position of the contour point.
[0143] Wherein, the second preset threshold is a preset value, and the second preset threshold may be the same as or different from the first preset threshold.
[0144] To sum up, in this embodimen...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com