

Target intelligent perception and identification system and method based on space coding
A technology of spatial coding and intelligent perception, applied in the field of target intelligent perception system based on spatial coding, can solve problems such as large amount of calculation data analysis, reduce equipment cost, avoid image post-processing process, and improve time efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
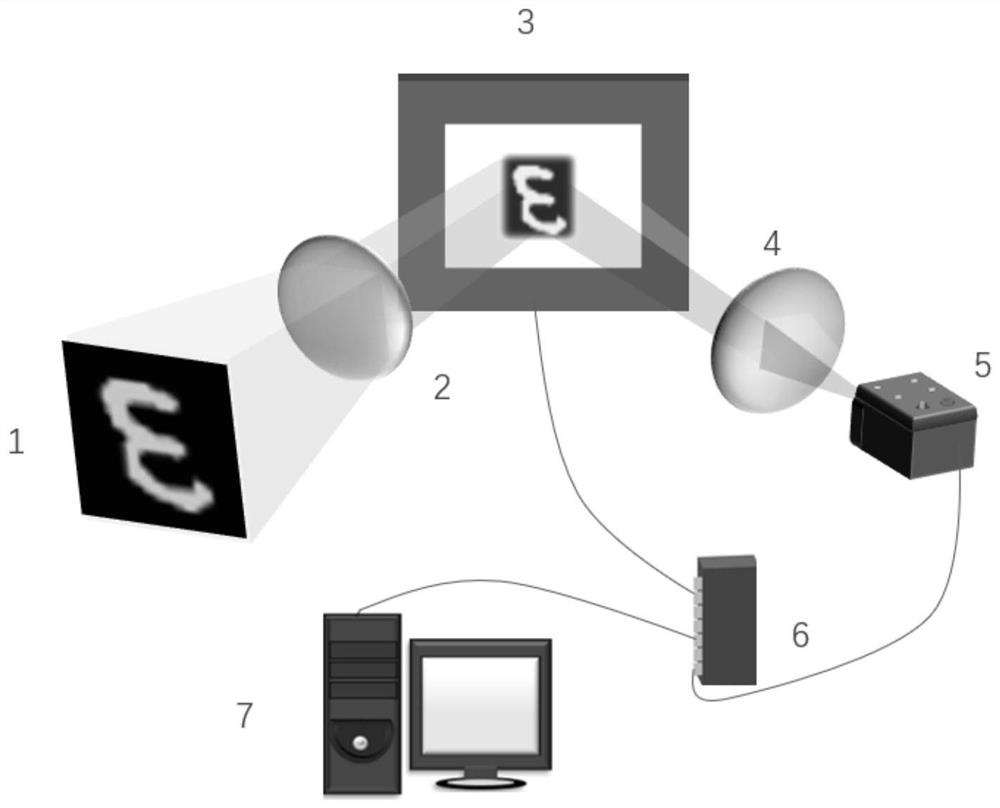
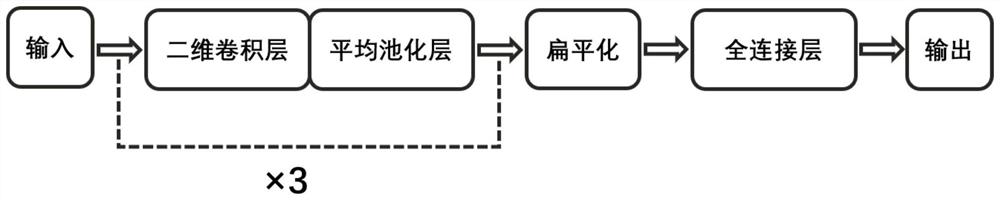
[0021] In Embodiment 1, the target intelligent perception and recognition system based on spatial coding is used to recognize handwritten digits in the public data set MNIST. Among them, the MNIST handwritten digit data set used contains 60,000 training samples with labels and 10,000 verification samples with verification labels, each of which is a grayscale image composed of 28×28 pixels and the label It is one of the numbers from 0 to 9; use the one-to-many method to simplify the task of recognizing digits into ten binary classification tasks, that is, each time one class is used as the target group, and the remaining nine classes are used as the background group. The specific structure of the convolutional neural network for binary classification is as follows: figure 2 shown, and finally evaluate its performance using 5-fold cross-validation method. More specifically, before feeding the image data into the convolutional neural network, each image data is normalized, and ...
Embodiment 2
[0046] In this embodiment, the target intelligent perception and recognition system based on spatial coding is used to identify the direction of the target line segment. The specific implementation steps are as follows:
[0047] Step 1. Using the shape and direction features of the line segment to directly generate the weight value of each pixel unit in the space required for spatial encoding. The shape feature of the line segment determines that these weight values are distributed in strips, and the direction feature of the line segment determines that these weight values are distributed in different angles, so the weight values of each pixel unit in the final generated space are distributed in strips at different angles, such as Figure 5 shown.
[0048] Step 2. Using the weight values distributed in different angles in the strip shape generated in step 1 to control the spatial light modulator to perform spatial encoding, that is, to control the micromirror units in...
Embodiment 3
[0051] In this embodiment, the target intelligent perception and recognition system based on spatial coding is used to perform mean value filtering on the target, and the size of the mean value filter is 3×3 pixels. The specific implementation steps are as follows:
[0052] Step 1. Directly generate the weight value of each pixel unit in the space required for local space encoding according to the characteristics of the mean filter. Since the size of the mean filter is 3×3 pixels, the size of the final generated local space should be 3×3 pixels, and the weight value of each pixel unit in the local space is 1 / 9.
[0053] Step 2. Use the weight value of each pixel unit in the space generated in step 1 to control the spatial light modulator to perform spatial encoding, that is, control the pixel point and the micromirror unit at the corresponding position of the eight pixel points around the pixel point to be "on" state, the rest of the micromirror units are in the "off" state, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More