

Under-actuated bionic manipulator
A manipulator and underactuated technology, applied in the direction of manipulators, auxiliary devices, chucks, etc., can solve the problems of astronauts' life safety threats, piercing space suits, etc., and achieve the effects of good adaptability, improved robustness, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
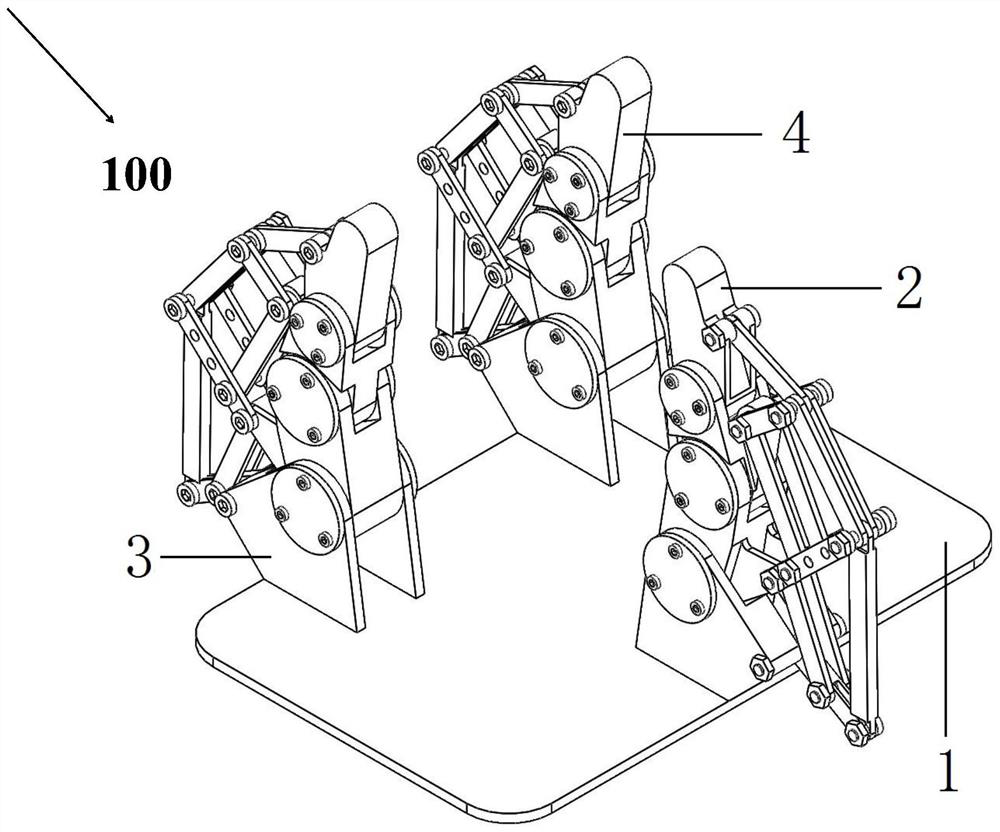
[0025] figure 1 is a three-dimensional schematic diagram of an underactuated bionic manipulator in an embodiment of the present invention.
[0026] Such as figure 1 As shown, an underactuated bionic manipulator 100 of this embodiment is used to grab workpieces during welding, including: a palm 1 and three fingers mounted on the palm 1 .
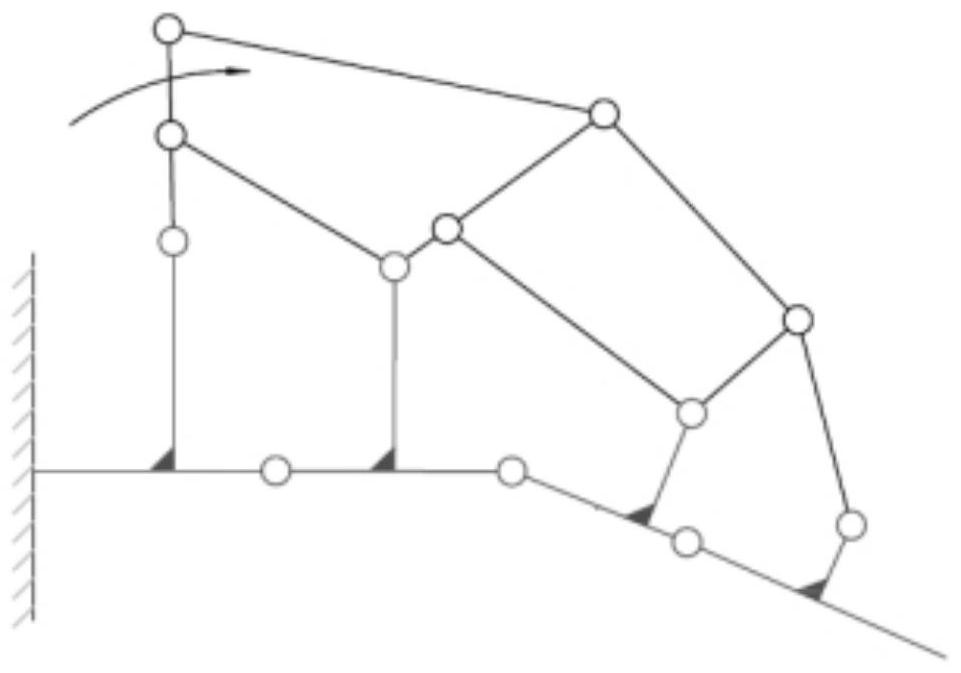
[0027] figure 2 It is a schematic diagram of the fingers of the underactuated bionic manipulator in the embodiment of the present invention.
[0028] Such as figure 1 and figure 2 As shown, the structures of the three fingers are the same, being the thumb 2 installed in the middle of the long side on one side of the palm 1, the middle finger 3 and the index finger 4 installed on the long side of the other side of the palm 1, and the thumb 2, middle finger 3 And the index finger 4 is distributed on the palm 1 in the shape of an isosceles triangle.
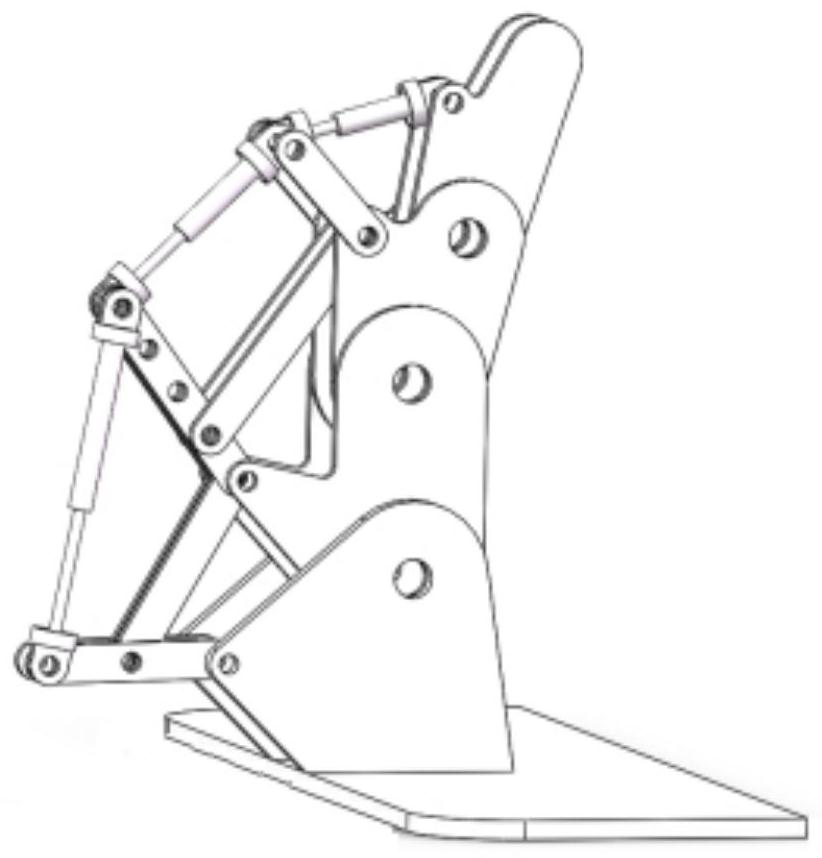
[0029] image 3 It is a schematic diagram of a finger containing a linear spring of an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More