

Environment modeling and path planning method based on multi-sensor fusion
A technology of multi-sensor fusion and path planning, applied in instruments, road network navigators, electromagnetic wave re-radiation, etc., can solve the problem of high error rate of unmanned vehicles, increase positioning accuracy, narrow search range, and reduce search time Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0041] In the current research, the path planning for unmanned vehicles is mostly based on simple or globally known environments, and the schemes in complex field environments are relatively blank. Unmanned vehicles can make autonomous decisions and avoid obstacles without a good perception system. The single-sensor sensing environment is only applicable to a specific environment and has great limitations.
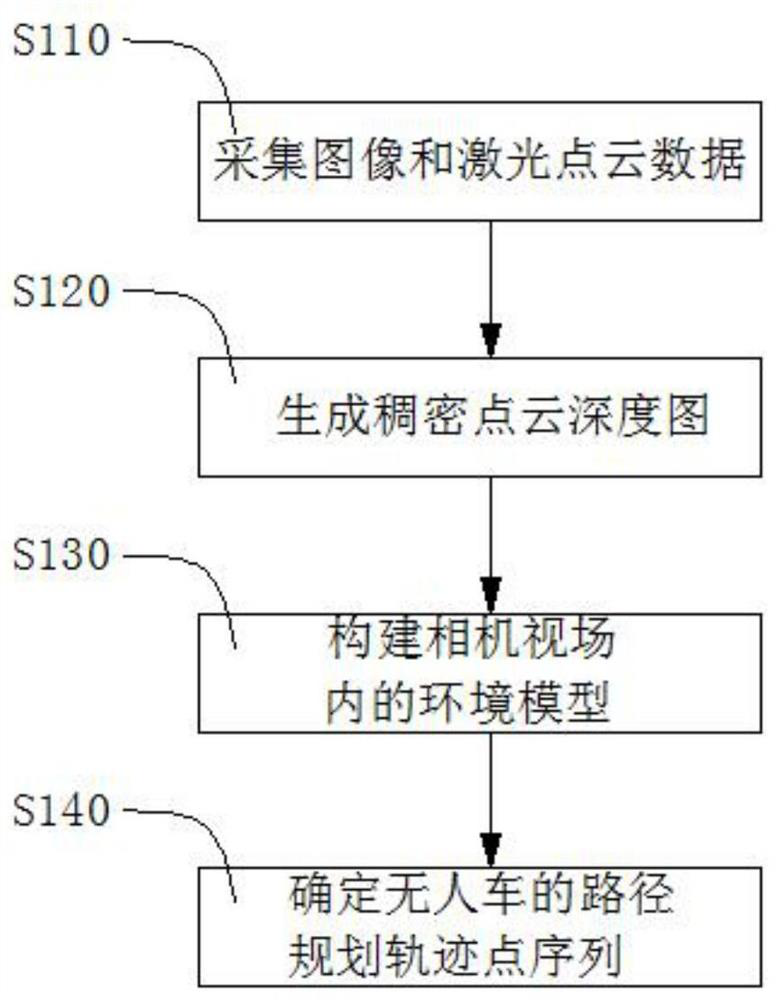
[0042] Therefore, the present invention proposes a multi-sensor fusion environment modeling algorithm and a path planning method under multi-constraint optimization on the basis of researching the autonomous perception and avoidance technology of unmanned vehicles. And the path planning technology based on mathematical models enables autonomous unmanned vehicles to make online decisions and drive safely in complex field environments. Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More