

Variable stiffness joint for flexible robot based on hybrid electromagnet
A hybrid electromagnetic and robot technology, applied in the field of flexible robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
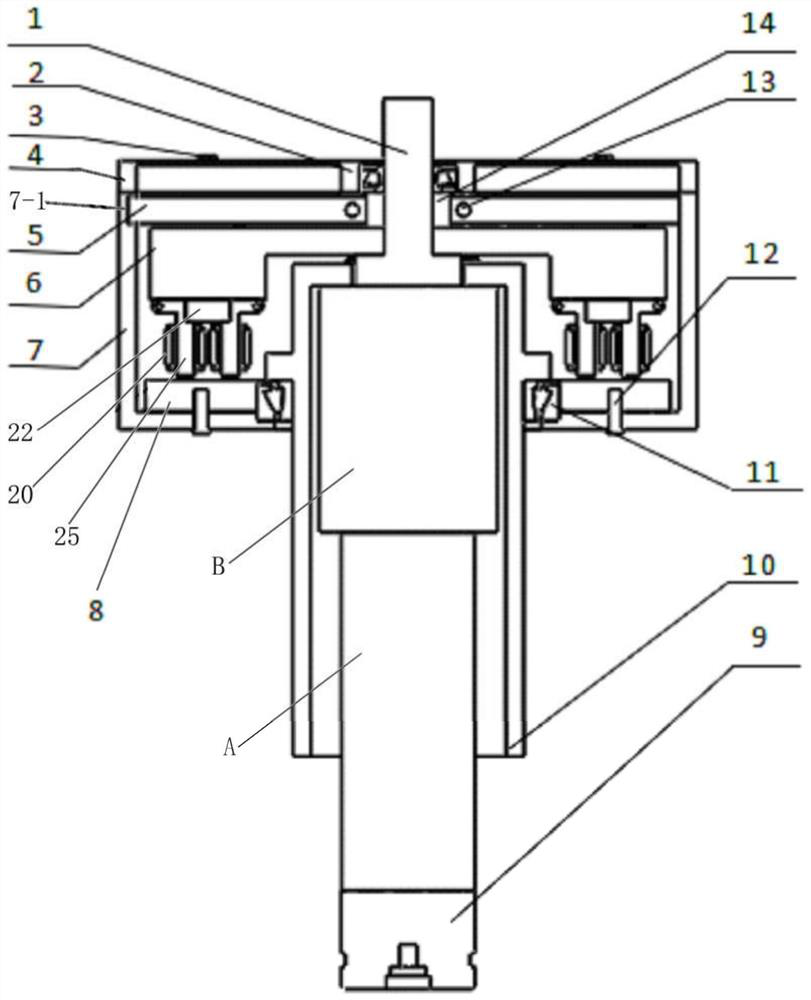
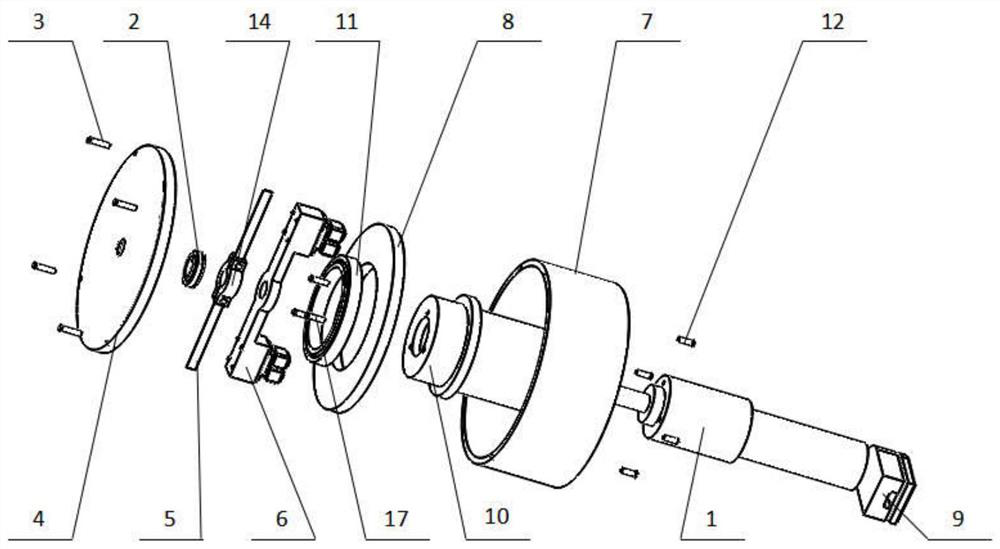
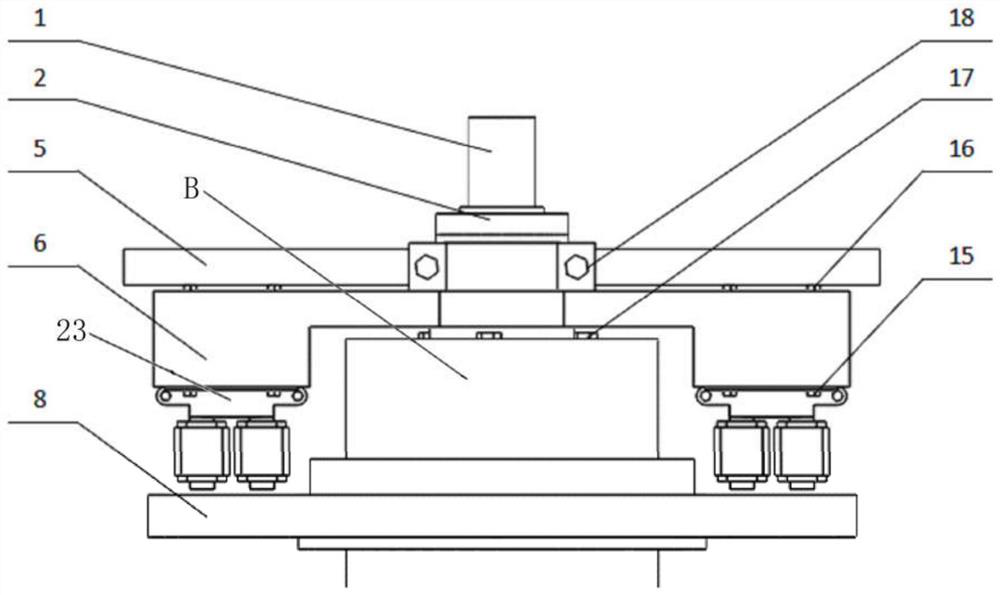
[0037] A variable stiffness joint for a flexible robot based on a hybrid electromagnet, including a motor A, a hybrid electromagnet fixed bushing (6), a hybrid electromagnet, a joint casing (7), electrical pure iron (8) and a motor support frame (10); the hybrid electromagnet fixed shaft sleeve (6), the hybrid electromagnet and electrician pure iron (8) are located in the joint shell (7);
[0038] The motor support frame (10) is enclosed within the motor (A), and the motor output shaft (1) passes through the front end of the motor support frame (10) (i.e. figure 1 middle), the hybrid electromagnet is installed on the rear end of the hybrid electromagnet fixed bushing (6) (ie figure 1 The lower end of the hybrid electromagnet fixed shaft sleeve (6) shown), the hybrid electromagnet is located between the hybrid electromagnet fixed shaft sleeve (6) and the electric pure iron (8); the hybrid electromagnet fixed shaft sleeve (6) and the motor The output shaft (1) is fixedly connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More