

Camera and laser radar re-calibration method and device and computer readable storage medium
A laser radar and calibration method technology, applied in the field of intelligent driving environment perception, can solve the problems of poor robustness, time-consuming and labor-intensive, inapplicable on-site calibration, etc., achieving small calibration error, high calibration accuracy and robustness, saving manpower and time cost effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0039] In order to make the purpose, technical solutions and advantages of the embodiments of the present application clearer, the following will further describe the embodiments of the present application in detail in conjunction with the accompanying drawings.
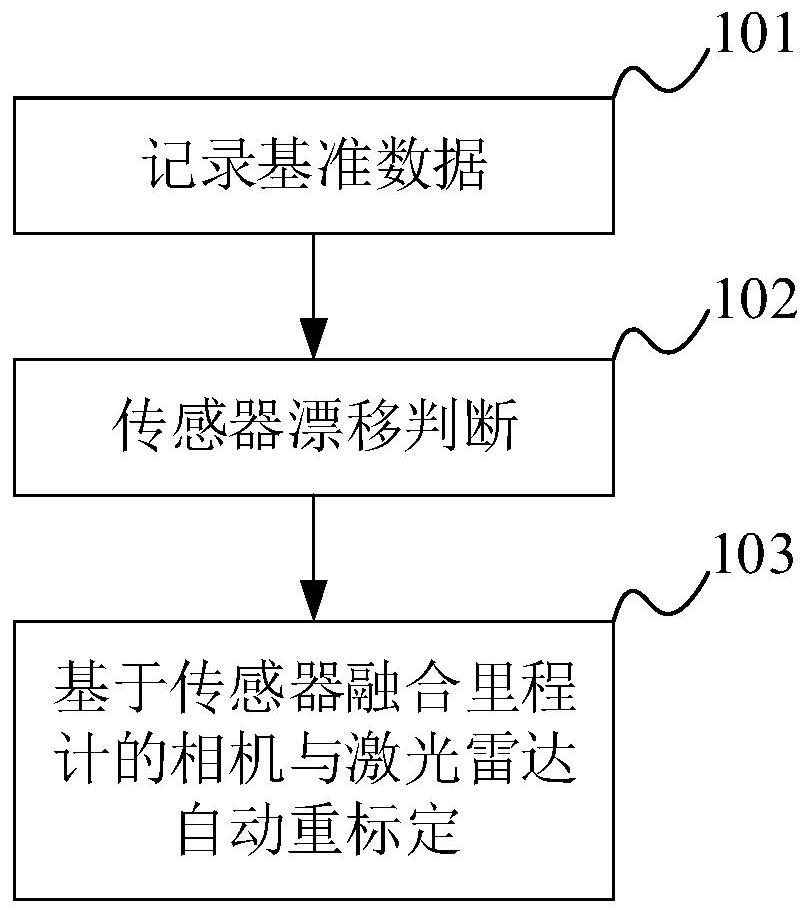
[0040] Please refer to figure 1 , which shows a flow chart of a camera and lidar automatic recalibration method based on a sensor fusion odometer provided by an embodiment of the present application. The sensor fusion odometer-based camera and lidar automatic recalibration method can be applied to intelligent driving in the vehicle system. The camera and lidar automatic recalibration method based on sensor fusion odometer may include:
[0041] Step 101, record reference data: firstly, use a well-calibrated camera and lidar, that is, acquire a reference camera image and a reference point cloud at a reference position when the relative pose of the sensor does not change.
[0042] In this embodiment, any calibration m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More