

Humanoid robot and its joints
A humanoid robot and joint technology, applied in the field of humanoid robots, can solve the problems of increasing the structural moment of inertia, reducing the strength of the mechanism, and difficult cable layout, etc., and achieve the effects of reducing inertia, reducing module weight, and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
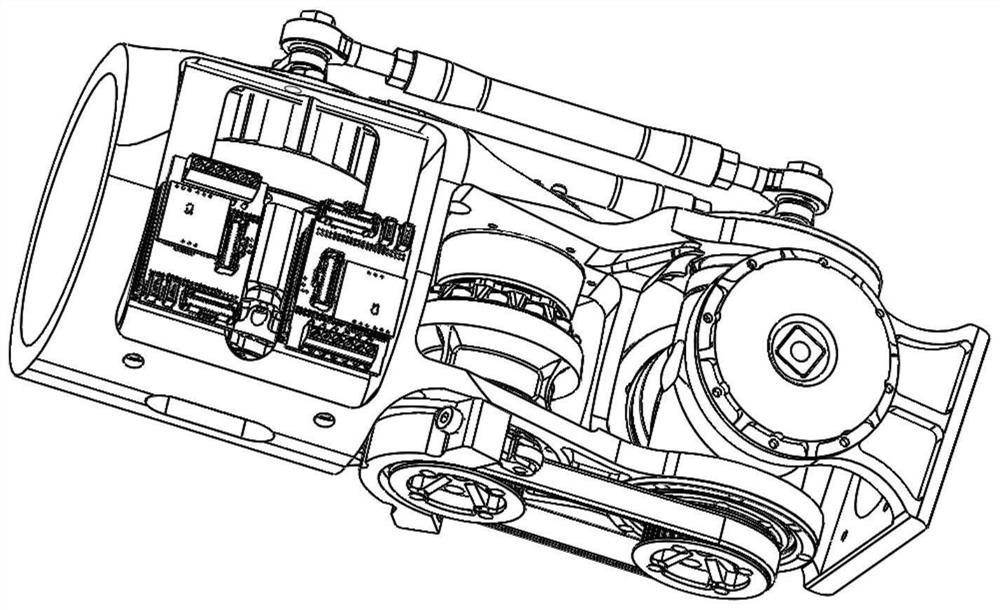
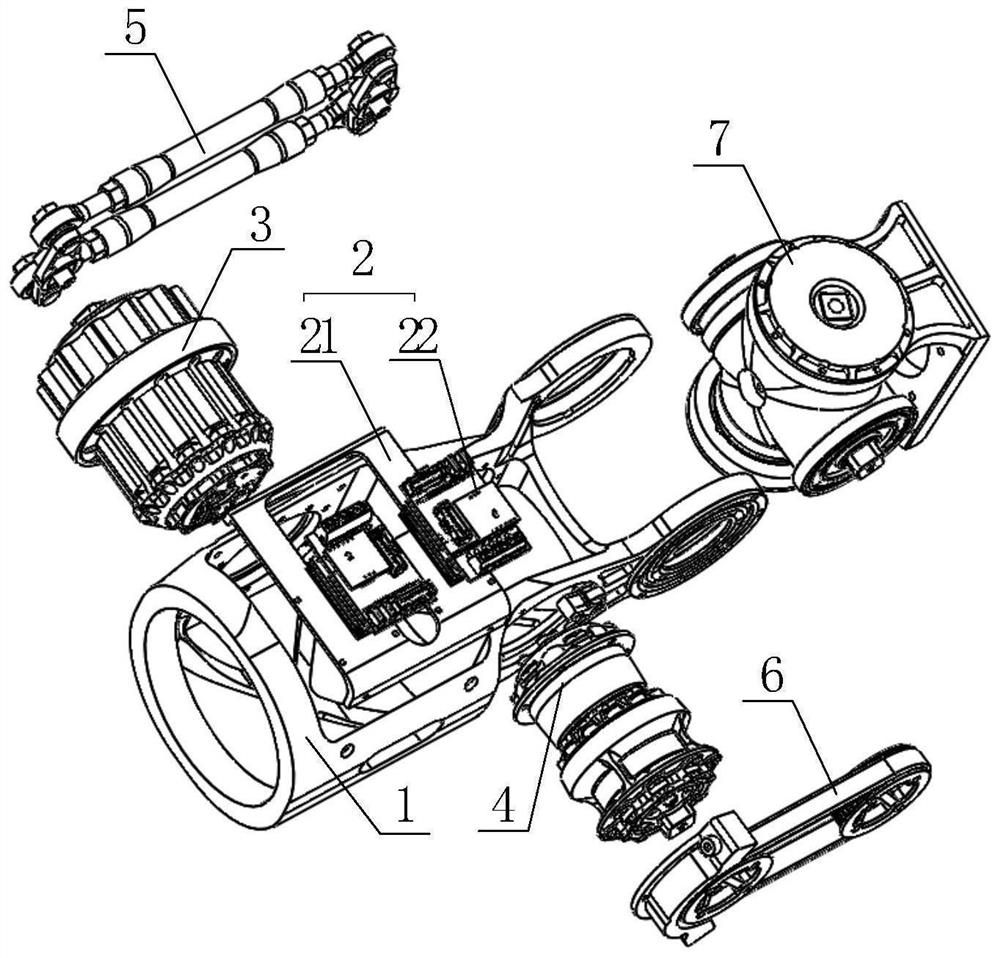
[0038] Such as figure 1 , 2As shown, the humanoid robot joint of the present invention is composed of a joint frame 1 , a driver module 2 , a first drive module 3 , a second drive module 4 , a connecting rod transmission module 5 , a synchronous belt transmission module 6 and a cross axis joint module 7 .
[0039] Such as figure 1 and figure 2 As shown, the joint frame 1 is used as the main frame of the humanoid robot joint, and adopts an integrated structure, which is similar to the shape of "冃" as a whole. The joint frame 1 away from the execution end is a hollow cylinder, and the joint frame 1 near the execution end is two opposite pieces. shape structure, and a pair of through holes are provided on the sheet structure; along the direction of the execution end, the first drive module 3, the second drive module 4 and the cross-axis joint module 7 are sequentially fixed in the joint frame 1, and the hollow cylindrical joint frame 1 is fixed with a driver module 2, and the...
Embodiment 2
[0051] A humanoid robot, including the humanoid robot joints in Embodiment 1, whose structural features have been described in Embodiment 1 in detail, and will not be repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More