

Indoor positioning method based on Bayesian iteration improved particle swarm optimization algorithm
A particle swarm optimization and indoor positioning technology, applied in the field of indoor positioning, can solve the problem of increasing positioning errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
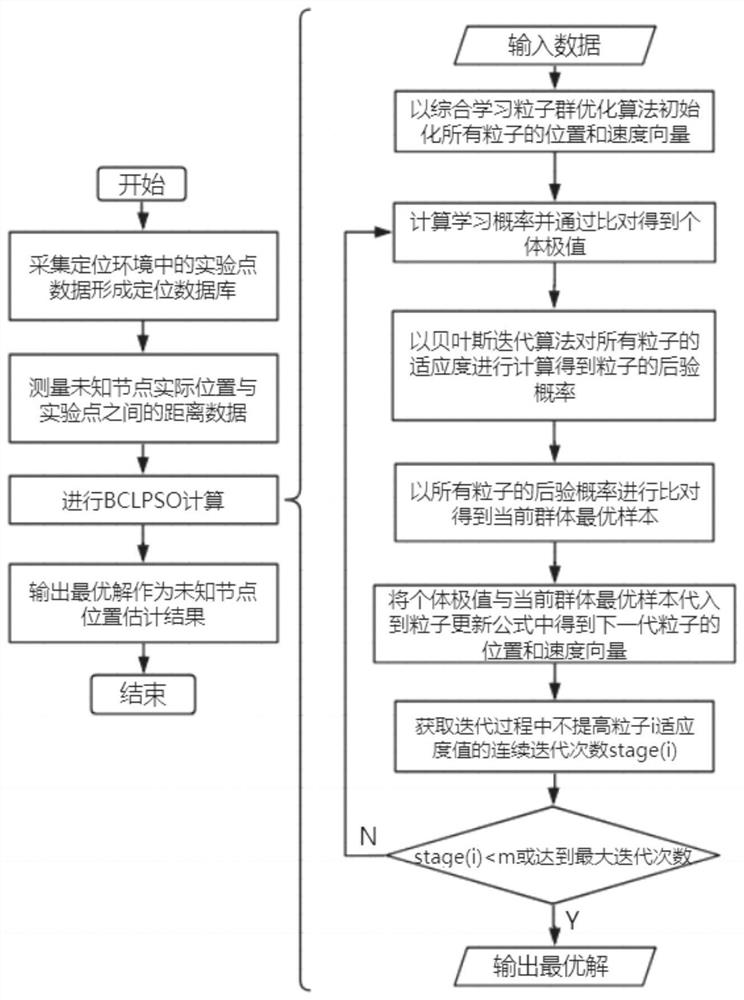
[0055] Indoor positioning method based on Bayesian iterative improved particle swarm optimization algorithm, the process includes:
[0056] (1) Acquisition of positioning database and measurement data of unknown nodes collection of:
[0057] Let the unknown node coordinates be , the coordinates of the known experimental point are , collect and save the data of known experimental points for subsequent position estimation calculations, the unit distance between points is set to θ, θ=1m, the total number of experimental points collected in this embodiment =400, the total number of iterations =100 times;
[0058] Collect the actual measured distance data between the unknown node and each experimental point, denoted as ;
[0059] Set the fitness function as the distance between the estimated position of the unknown node and each experimental point and the measured distance The variance of the difference of can be expressed as:
[0060]
[0061] in, is the fitnes...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More