

Laser radar SLAM algorithm and inertial navigation fusion positioning method
A laser radar, fusion positioning technology, applied in surveying and navigation, navigation, road network navigator and other directions, to achieve the effect of wide use prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Preferred embodiments of the present invention will be specifically described below in conjunction with the accompanying drawings, wherein the accompanying drawings constitute a part of the application and are used together with the embodiments of the present invention to explain the principle of the present invention.
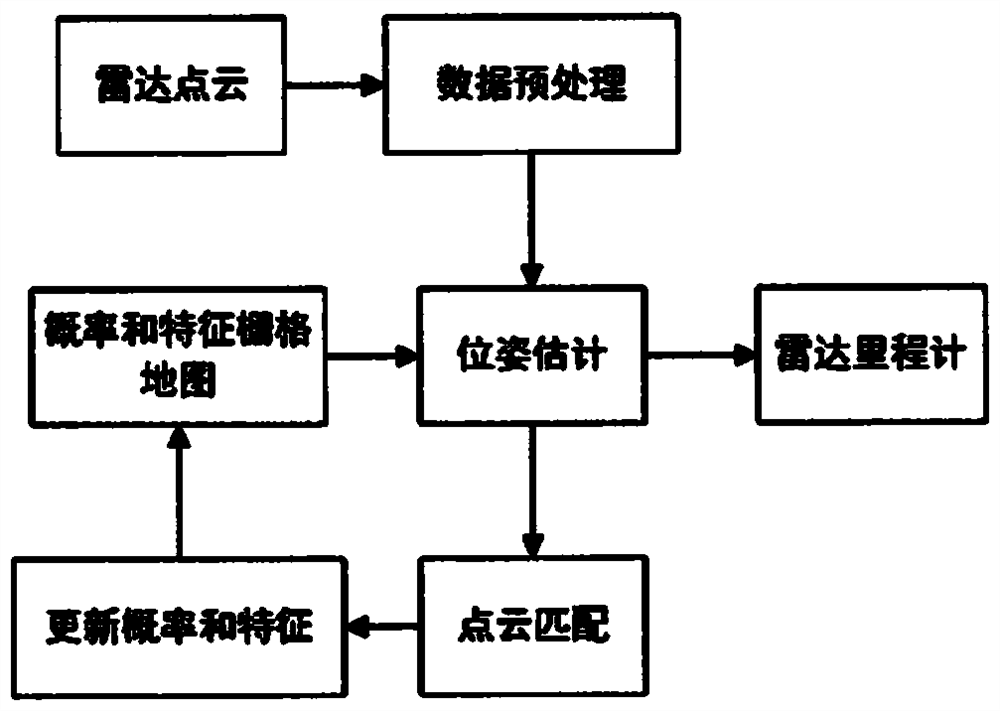
[0022] A specific embodiment of the present invention discloses a lidar mileage calculation method based on a characteristic probability grid map, such as figure 1 shown, including the following steps:
[0023] Data preprocessing, feature probability map update, point cloud and map matching and update pose.
[0024] Data preprocessing is the preliminary processing, downsampling and classification of the lidar point cloud;
[0025] The main function of the feature probability map update part is to manage the map, extract point cloud distribution features, update the grid, etc.;
[0026] Point cloud matching and pose update is through the data associati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More