

Unmanned ship group formation cooperative control method considering time-varying drift angle and attitude adjustment
A collaborative control, unmanned boat technology, applied in non-electric variable control, two-dimensional position/channel control, control/regulation system, etc., can solve the problem of limited communication radius between followers and pilots, difficult to calculate relative position changes, The way of arrangement changes all the time, etc., to achieve the effect of flexible boat group maneuverability, improving flexibility and maneuverability, and enhancing robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
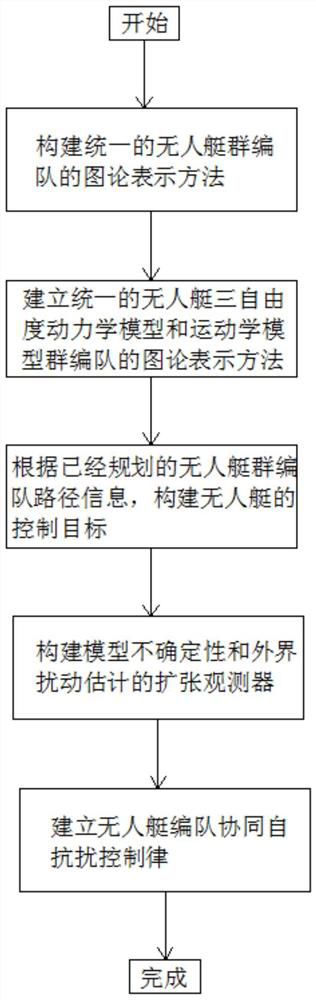
[0069] In order to make the objectives, technical solutions and advantages of the present invention, the present invention will be described in further detail below with reference to the accompanying drawings and examples. It should be understood that the specific embodiments described herein are merely intended to illustrate the invention and are not intended to limit the invention. Further, the technical features according to each of the various embodiments described below can be combined with each other as long as they do not constitute a collision between each other.
[0070] The present invention studies the seas and unoccupied fleet in the leader - the formation of the formation of the formation of the formation in the following mode. Each drowning will be affected by model uncertainty and ocean disturbances caused by wind, waves and ocean flow. Based on the expansion state observer structure, the integrated formation of the tracking differentizer is proposed, so that the fo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More