

High-rise fire-fighting multi-unmanned aerial vehicle sliding-mode tracking control method and system under unknown disturbance
A tracking control, multi-UAV technology, applied in the control/regulation system, non-electric variable control, vehicle position/route/altitude control, etc., can solve the stability and performance degradation of UAV swarms and the hidden dangers of high-level fire rescue. , UAV communication discontinuity and other problems, to achieve the effect of achieving coordinated and stable flight, eliminating influence and reducing energy consumption
Image

Examples
Embodiment 1
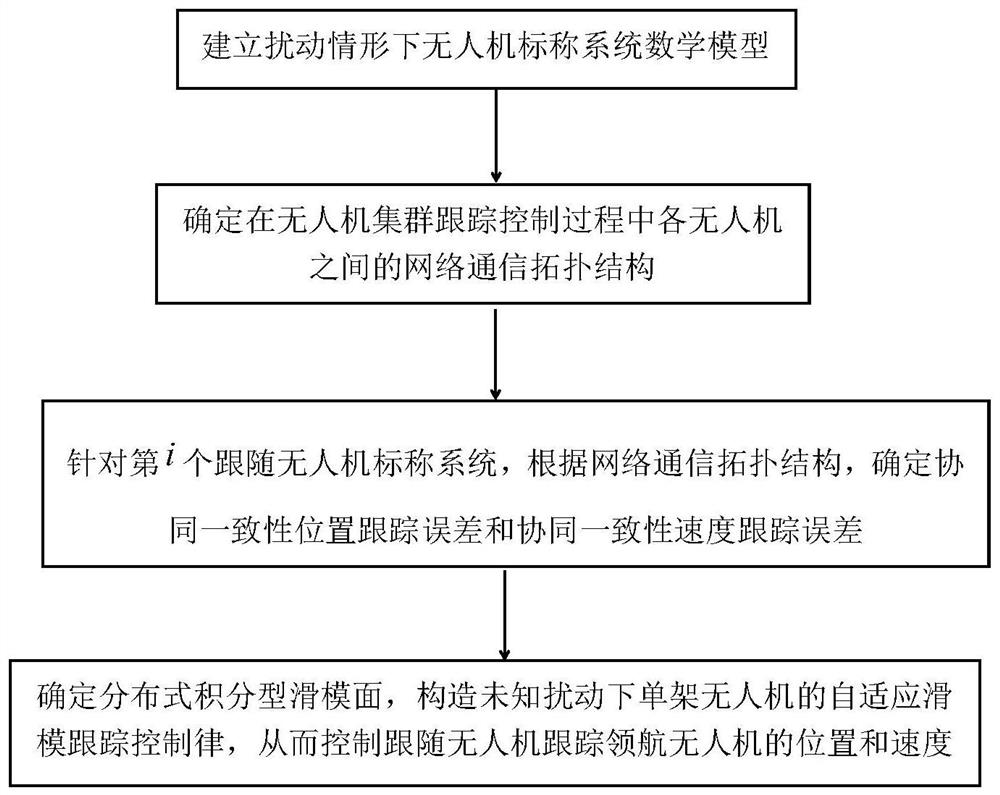
[0061] In a typical embodiment of the present invention, such as figure 1 As shown, an adaptive sliding mode tracking control method for high-level firefighting multi-UAVs under unknown disturbance is proposed, which includes the following steps:
[0062] S1: Establish a mathematical model of the nominal system of high-rise fire-fighting UAVs under disturbance conditions;
[0063] S2: Determine the network communication topology between each UAV during the UAV swarm tracking control process;
[0064] S3: For the i-th following UAV nominal system, define the appropriate consistent position tracking error and consistent velocity tracking error;
[0065] S4: Based on the event trigger function and adaptive sliding mode control theory, a new type of sliding mode surface is designed. Based on this, an adaptive sliding mode tracking control law for a single fire-fighting UAV under unknown disturbance is constructed to eliminate the impact of external disturbance on no The impact o...
Embodiment 2
[0126] This embodiment provides a multi-UAV adaptive sliding mode tracking control system under unknown disturbance, including:
[0127] The first module is used to establish the mathematical model of the nominal system of the UAV under the disturbance situation;
[0128] The second module is used to determine the network communication topology between the UAVs during the UAV swarm tracking control process;
[0129] The third module is used to determine the collaborative consistency position tracking error and the collaborative consistency speed tracking error for the i-th following UAV nominal system according to the network communication topology;
[0130] The fourth module is used to determine the distributed integral sliding mode surface, and construct the adaptive sliding mode tracking control law of a single UAV under unknown disturbance, so as to control the position and speed of the following UAV to track the leading UAV.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
- IPC
- G05D1/10
- CPC
- G05D1/104; Y02T10/40
- Inventors
- 姚得银; 鲁仁全