

Pedestrian inertia SLAM method based on virtual landmark
A virtual landmark and virtual ground technology, applied in the field of pedestrian navigation, can solve the problems of unable to meet the long-term high-precision pedestrian navigation requirements, large cumulative errors, large noise, etc., and achieve the effect of improving reliable navigation time and reducing cumulative errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
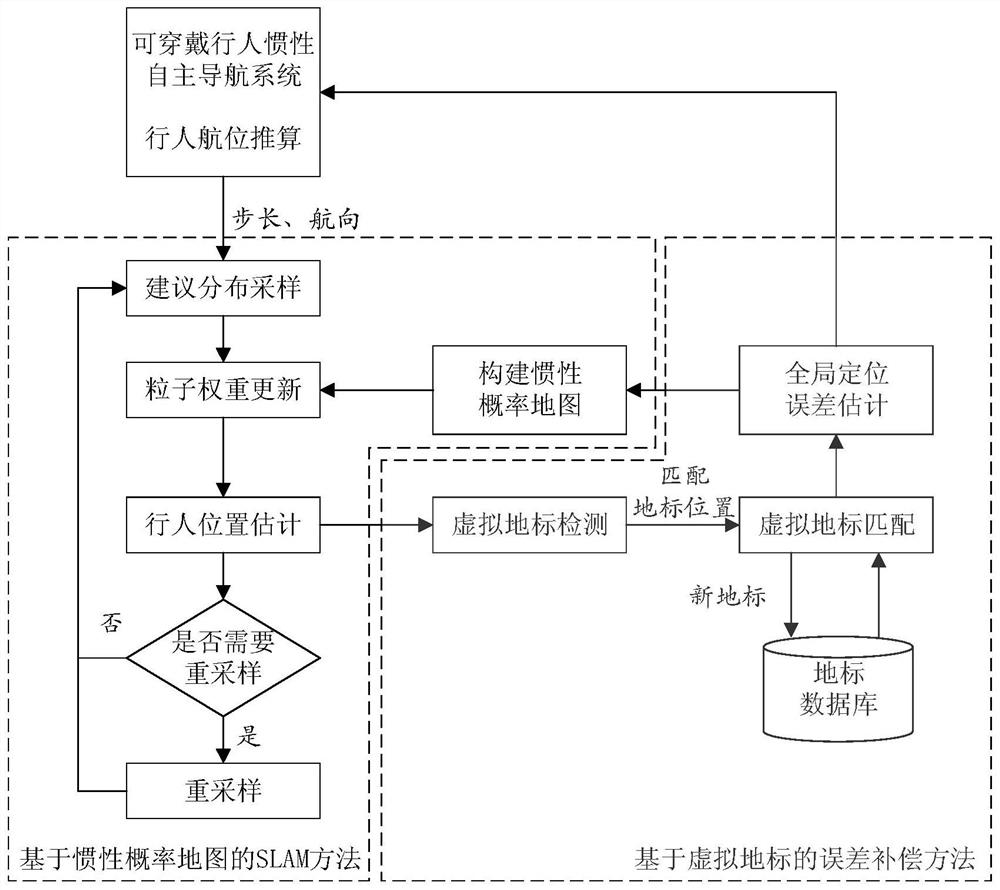
[0055] Such as figure 1 As shown, a pedestrian inertial SLAM method based on virtual landmarks includes the following steps:
[0056] Step 1, set the thresholds required by the algorithm, including the threshold φ for detecting the turning state 1 , virtual landmark screening distance threshold L pth1 , virtual landmark screening step interval threshold L sth1 , the virtual landmark matching distance threshold L pth2
[0057] Step 2, according to the error distribution p(E k |E k-1 ) for sampling, the error vector E k and the measurement vector Z output by the pedestrian odometer k Adding them to get the noisy gait vector U k .
[0058] u k = Z k +E k
[0059] Step 3, calculate the new pose of each particle according to the appropriate amount of gait,
[0060]
[0061] in is the position of the mth particle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More