

Multi-stage series-scalable dry-adhesive wheel-footed wall-climbing robot and its motion method
A wall-climbing robot and dry-adhesion technology, applied in the fields of motor vehicles, transportation and packaging, can solve the problems of unreported, unresearched, and limited functions of motion methods, and achieve clear motion principles, enhanced reliability, and improved reliability. simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
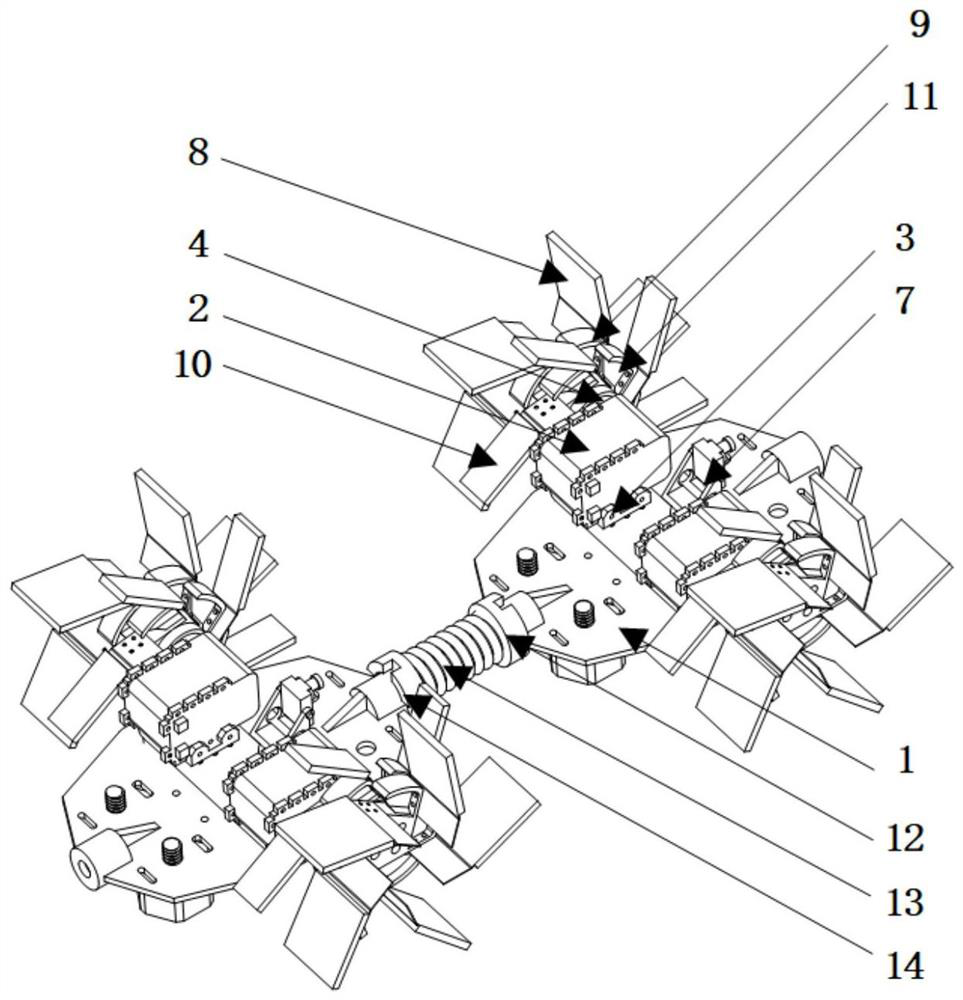
[0052] combine Figure 1-14 , The object of the present invention is to provide a multi-stage series-connected expandable dry-adhesive wheel-footed wall-climbing robot and its movement method.
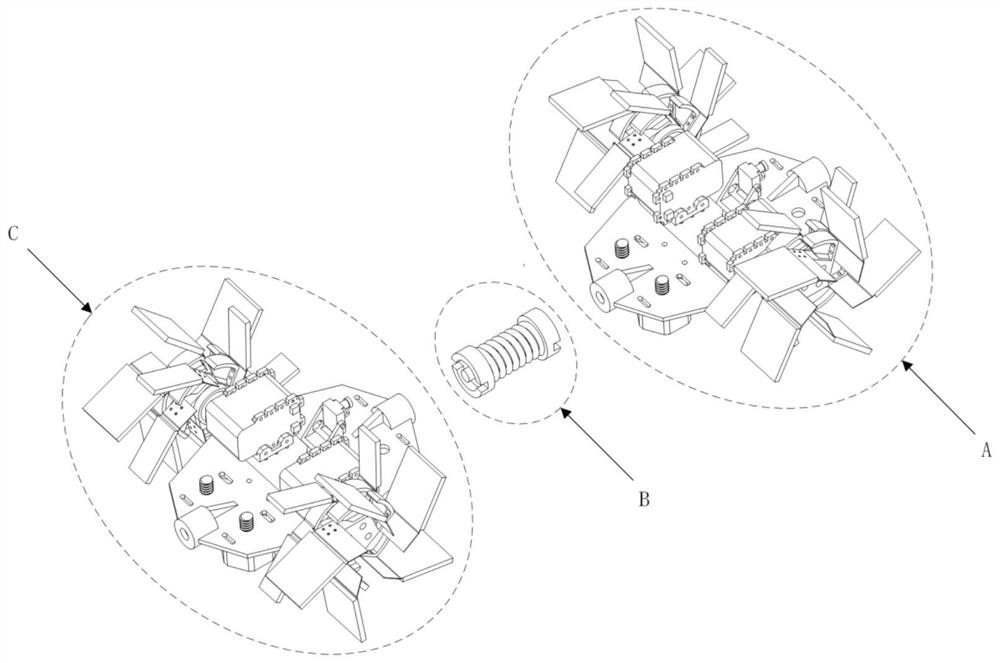
[0053] Such as figure 2 As shown, the object of the present invention is to provide a multi-stage series-connected expandable dry-adhesive wheel-foot wall-climbing robot, which is characterized in that: it includes a front wall-climbing unit A, a magnetic connection spring B, and a rear wall-climbing unit C; The wall unit A and the rear climbing wall unit C are magnetically connected through the magnetic connection spring B, and the symmetry lines of A and C coincide with the axis of B; the magnetic connection spring B is composed of a first magnet 12, a spring 13 and a second magnet 14, such as Figure 5 As shown, the two ends of the spring 13 are eq...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More