Inertial measurement data correction method and device based on convolutional neural network model
A convolutional neural network and measurement data technology, applied in measurement devices, instruments, etc., can solve problems such as large errors, reduced positioning and navigation progress, measurement data deviations, etc., to reduce errors, enhance reliability, improve training accuracy and effect of speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
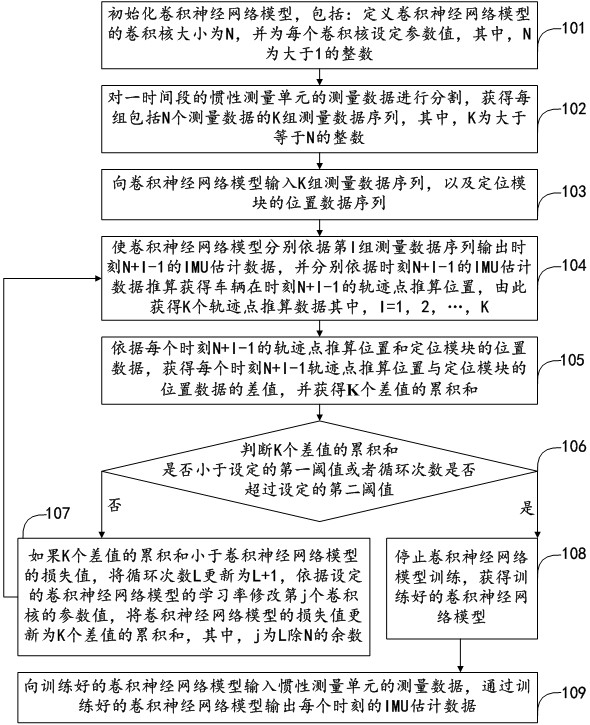
[0054] figure 1 It is a schematic flowchart of a method for correcting inertial measurement data based on a convolutional neural network model according to an embodiment of the present application.
[0055] see figure 1 , a method for correcting inertial measurement data based on a convolutional neural network model, including:
[0056] In step 101, the convolutional neural network model is initialized, including: defining the convolution kernel size of the convolutional neural network model as N, and setting parameter values for each convolution kernel, where N is an integer greater than 1.
[0057] In a specific implementation, the convolutional neural network model is initialized, a convolution kernel with a size of N can be defined, the N convolution kernels are sorted in turn, and the parameter values are set for each convolution kernel in turn; set The loss value LOSS of the convolutional neural network model; set the learning rate learn_rate of the convolutional...
Embodiment 2
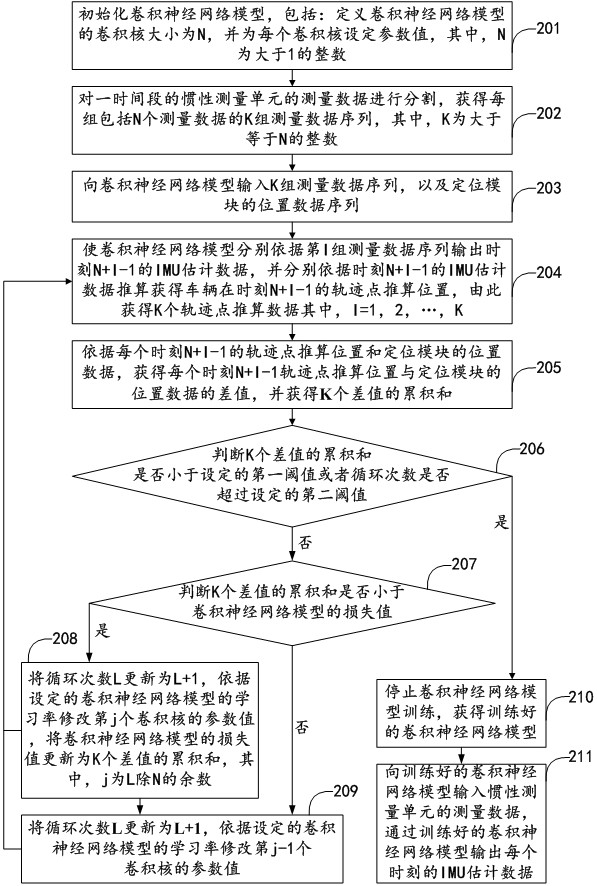
[0093] figure 2 It is a schematic flowchart of a method for correcting inertial measurement data based on a convolutional neural network model according to another embodiment of the present application. figure 2 compared to figure 1 The protocol of the present application is described in more detail.
[0094] see figure 2 , a method for correcting inertial measurement data based on a convolutional neural network model, including:
[0095]In step 201, the convolutional neural network model is initialized, including: defining the convolution kernel size of the convolutional neural network model as N, and setting parameter values for each convolution kernel, where N is an integer greater than 1.
[0096] For this step, reference may be made to the description of step 101, and details are not repeated here.
[0097] In step 202, the measurement data of the inertial measurement unit for a period of time is divided to obtain K groups of measurement data sequences including ...
Embodiment 3
[0140] Corresponding to the aforementioned embodiment of the application function realization method, the present application also provides a device for correcting inertial measurement data based on a convolutional neural network model, electronic equipment, and corresponding embodiments.
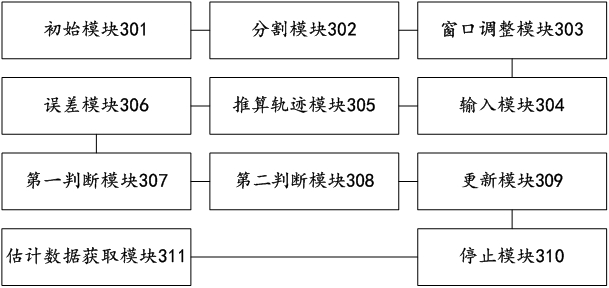
[0141] image 3 It is a structural schematic diagram of an inertial measurement data correction device based on a convolutional neural network model shown in an embodiment of the present application.
[0142] see image 3 , an inertial measurement data correction device based on a convolutional neural network model, including an initial module 301, a segmentation module 302, a window adjustment module 303, an input module 304, an estimated trajectory module 305, an error module 306, a first judgment module 307, a second Two judgment module 308 , update module 309 , stop module 310 , estimated data acquisition module 311 .
[0143] The initialization module 301 is used to initialize the co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com