

A pipeline inspection robot with variable track and its control method
An inspection robot and robot technology, applied in the field of robotics, can solve problems such as insufficient contact between the track surface and the pipe wall, and achieve the effects of reducing energy consumption, improving work efficiency, and reducing track wear
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific preferred embodiments.
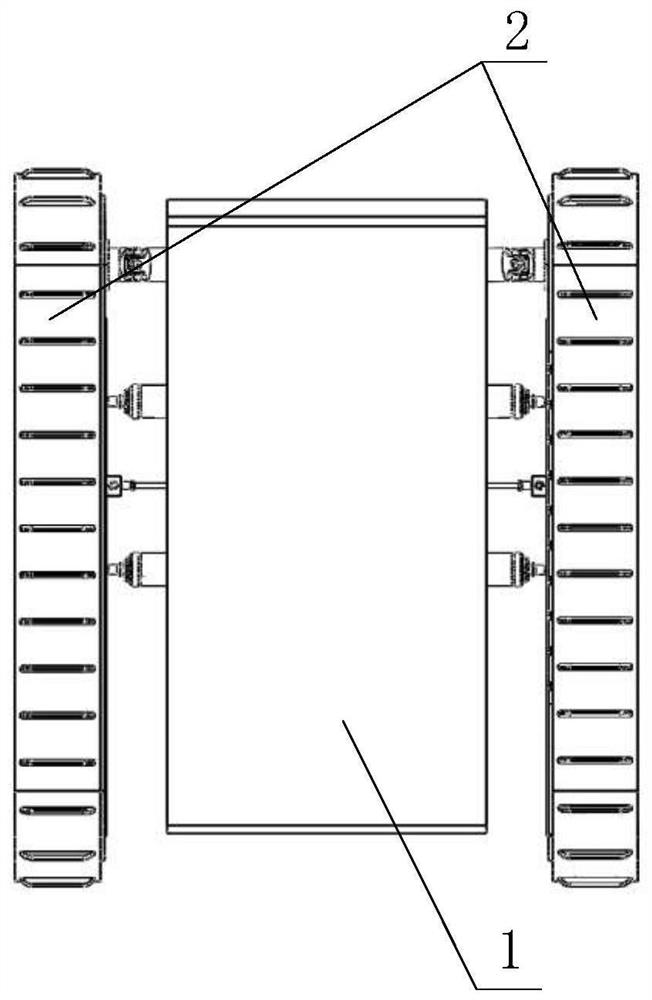
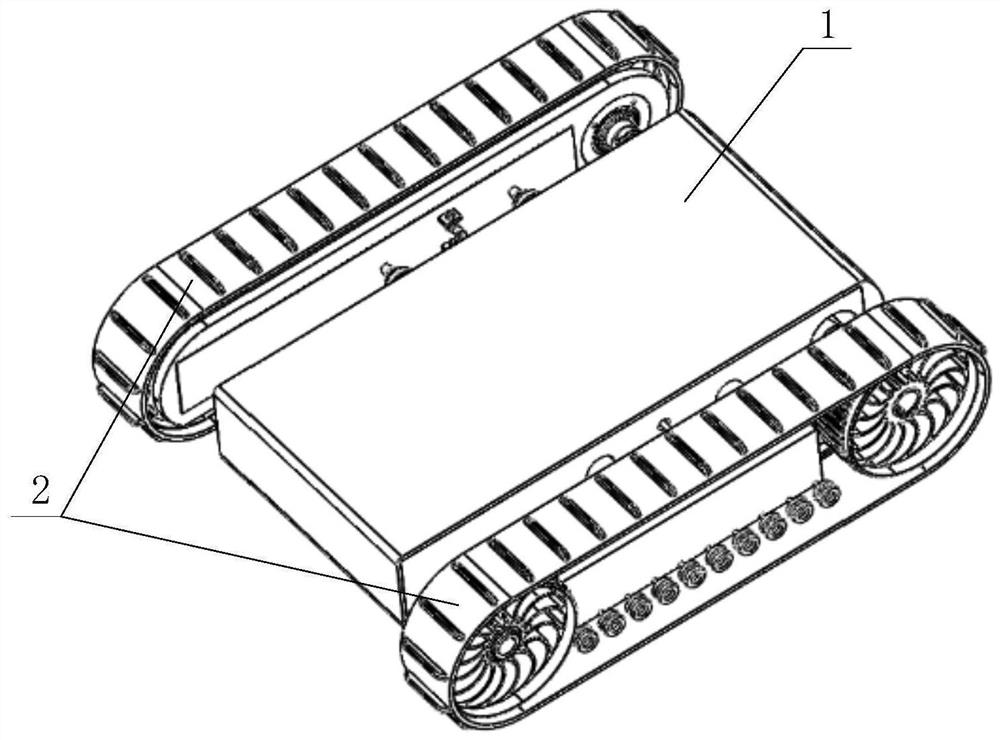
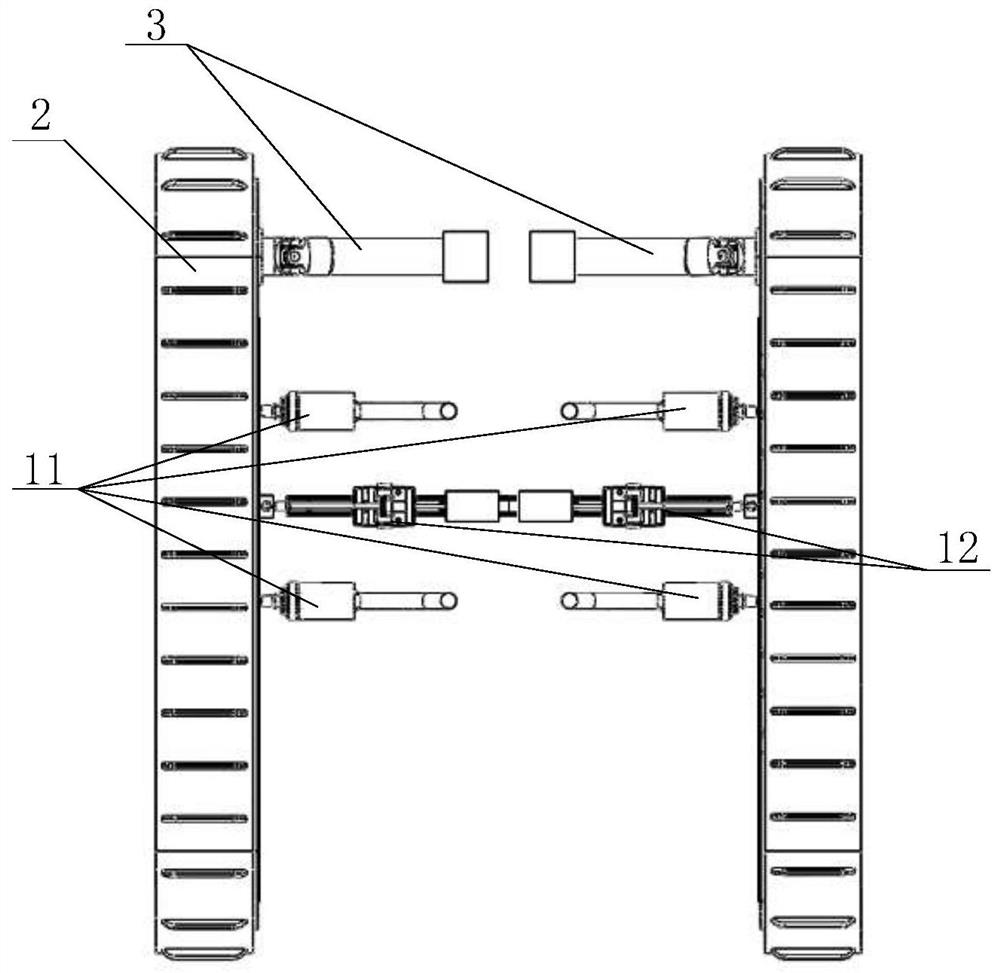
[0046] Such as figure 1 and figure 2 As shown, a pipeline inspection robot mechanism with variable crawlers includes a robot main body 1, crawler belt assemblies 2 on the left and right sides, and a traveling drive mechanism 3; 11, and a track angle adjustment mechanism 12 is respectively connected between the main body of the robot and the track assemblies on the left and right sides.
[0047] There are four groups of track fixing frames, which are symmetrically installed inside the main body of the robot, front and rear, and left and right. The symmetrical plane installed front and back is the plane where the four-bar linkage mechanism is located, and the installation height is the height of the transverse central axis 24 of the fixed side plate of the track. It plays a restraining role in the adjustment of the inclinat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More