

Control system suitable for underwater vehicle water surface recovery and control method thereof
A technology of control system and motion control system, which is applied in the field of control system for surface recovery of submersibles, can solve problems such as increased recovery failure of submersibles, increase of system complexity, encountering drive failures, etc., to improve reliability and stability, navigation track stability and reduce the effect of steady-state tracking error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
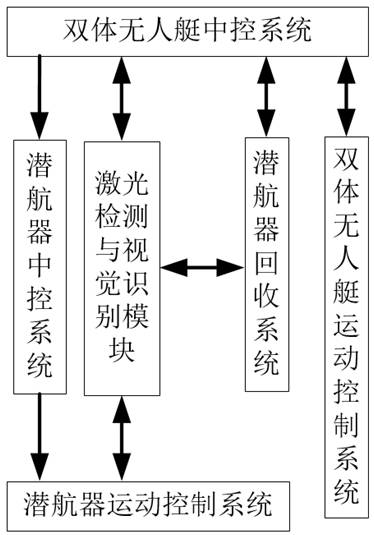
[0066] A control system suitable for surface recovery of submarines, including a catamaran unmanned boat central control system, a catamaran unmanned boat motion control system, a laser detection and visual recognition module, a submarine recovery system, a submarine drone central control system, a submarine Device motion control system; the control relationship between each system is as follows: figure 1 As shown, the central control system of the catamaran unmanned boat is respectively connected with the motion control system of the catamaran unmanned boat, the laser detection and visual recognition module, the recovery system of the submarine, and the central control system of the submarine; the motion control system of the submarine Connect with the laser detection and visual recognition module, the submarine recovery system, and the submarine central control system respectively; the laser detection and visual recognition module is connected with the submarine recovery syst...
Embodiment 2
[0108] A control method applicable to the control system of the underwater vehicle surface recovery described in embodiment 1, comprising the following steps:
[0109] Step 1. The central control system of the catamaran unmanned boat receives the recovery command sent by the user, generates the recovery command of the submarine and the detection and recognition command of the sea surface target, and transmits the recovery command of the submarine to the central control system of the submarine, and detects and recognizes the target on the sea surface. The recognition instruction is transmitted to the laser detection and visual recognition module;
[0110] Step 2, the submersible vehicle central control system generates the submersible vehicle up-floating command according to the received submersible vehicle recovery command, and transmits the submersible vehicle up-floating command to the submersible vehicle motion control system; the submersible vehicle motion control system re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More