

Three-dimensional motion gravity compensation system for space manipulator
A space manipulator, three-dimensional motion technology, used in transportation and packaging, space navigation equipment, simulation devices for space navigation conditions, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
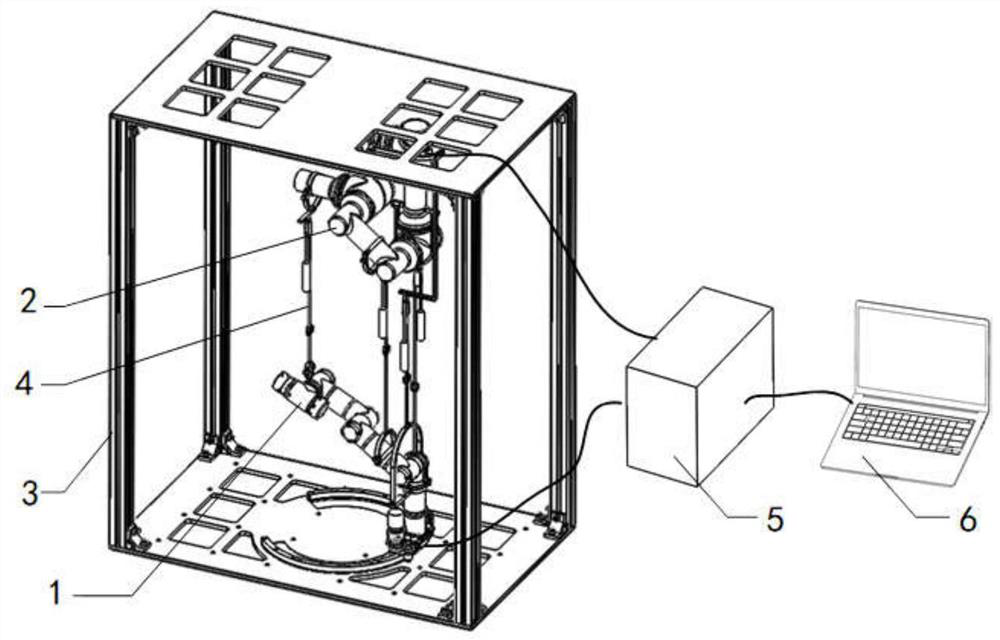
[0034] Such as figure 1 As shown, a three-dimensional movement gravity compensation system of a space manipulator provided by the present invention includes a compensated manipulator 1, a follower mechanism 2, a bracket 3 and a hanging wire suspension system 4, wherein the bracket 3 provides installation and support functions for the system, The compensated mechanical arm 1 is set at the bottom of the bracket 3, and the follow-up mechanism 2 is set at the top of the support 3, and is connected with the compensated mechanical arm 1 through the hanging wire suspension system 4; the structure of the compensated mechanical arm 1 and the follow-up mechanism 2 The model is the same, by synchronously controlling the movement of the compensated manipulato...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More