

Industrial intelligent motion control carrying robot
A technology of motion control and robotics, applied in cranes, transportation and packaging, load hanging components, etc., can solve the problems of inconvenient picking and placing items, unable to meet the needs of automatic handling of factory pallets, and low degree of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
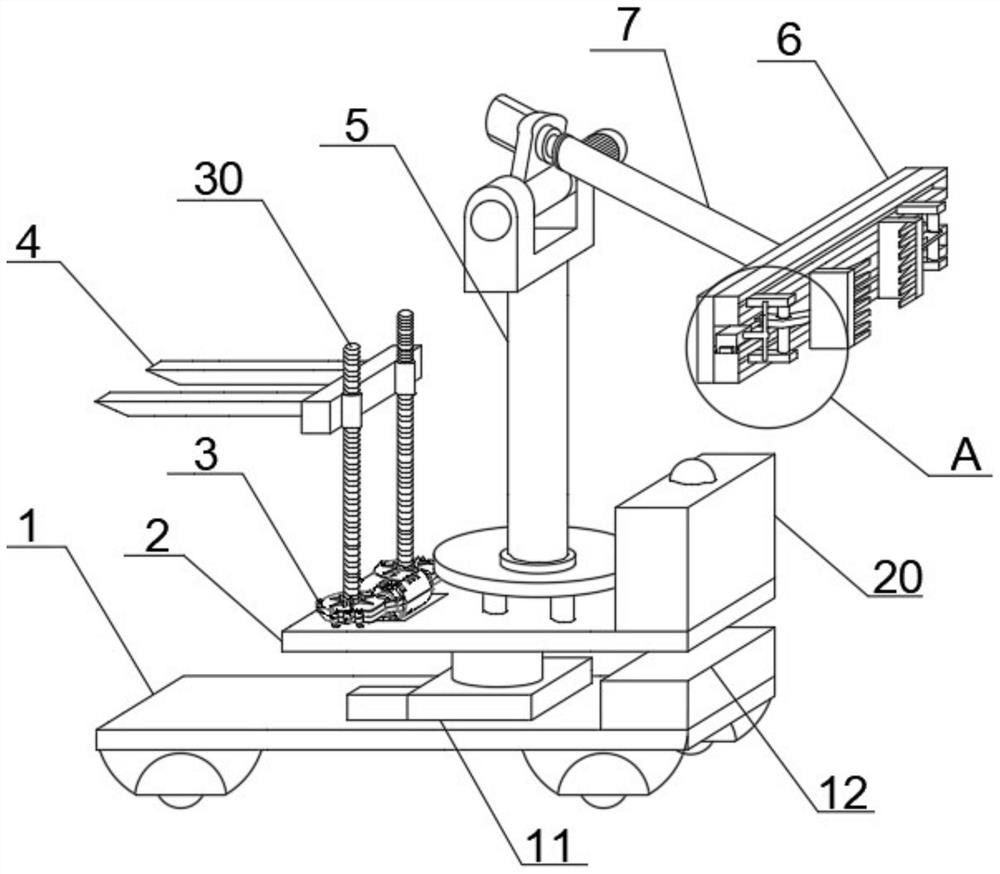
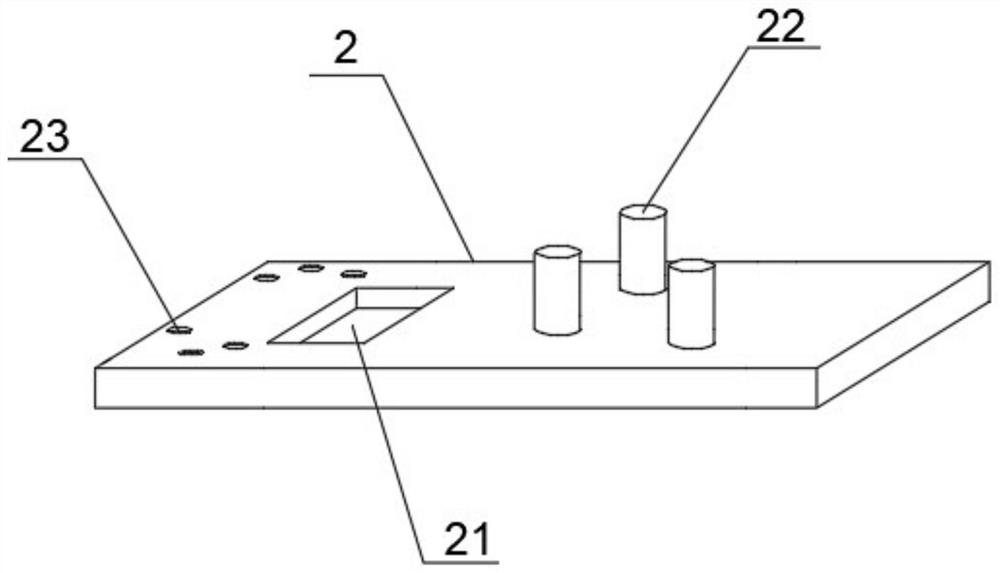
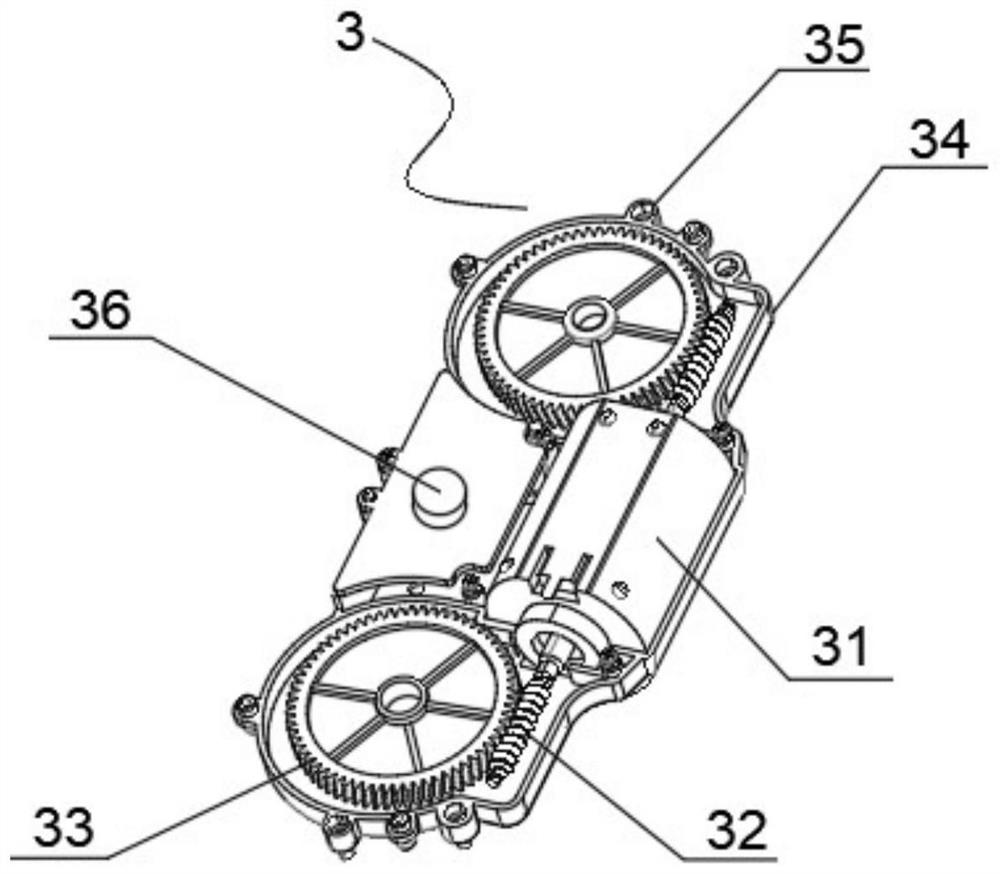
[0039] Such as figure 1 As shown, an industrialized intelligent motion control carrier robot includes a moving chassis 1, a carrier plate 2 is arranged on the moving chassis 1, an electric rotating disk 11 is arranged between the moving chassis 1 and the carrier plate 2, and the carrier The upper side of the board 2 is provided with a carrying fork body 4, and the carrying fork body 4 realizes automatic lifting through the lifting power drive structure 3, and the upper side of the carrier board 2 is provided with an electric control box 20. The control box 20 includes a control system and a sensor system. A rotatable mechanical shaft arm structure 5 is provided between the carrying fork 4 and the electric control box 20. A rotatable mechanical shaft arm structure 5 is provided on the top of the mechanical shaft arm structure 5. The telescopic mechanical arm 7 is provided with a rotatable mechanical gripper structure 6 at the top of the telescopic robotic arm 7 , and the mechan...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More