

Automatic forklift robot butt joint method and automatic forklift robot
A robotic and automatic technology, applied in the direction of lifting devices, etc., can solve the problem that the automatic forklift cannot transport the goods to the target position.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] In order to make the purpose, technical solutions and advantages of the present invention more clear, the present invention will be further described in detail below in conjunction with the accompanying drawings and implementation examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
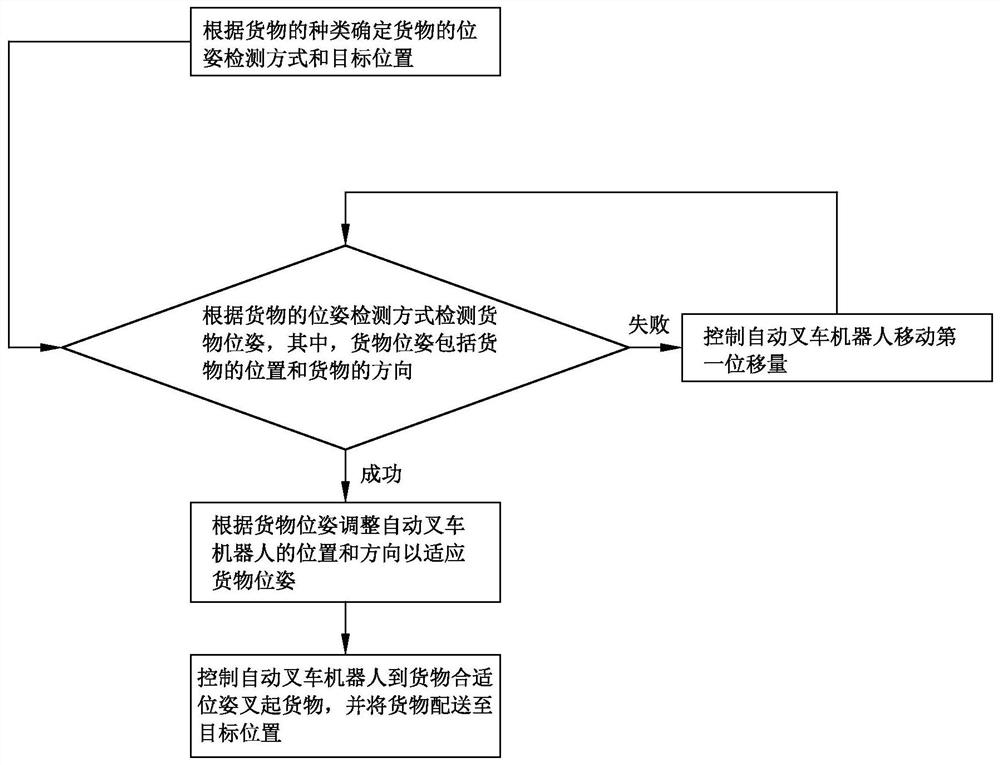
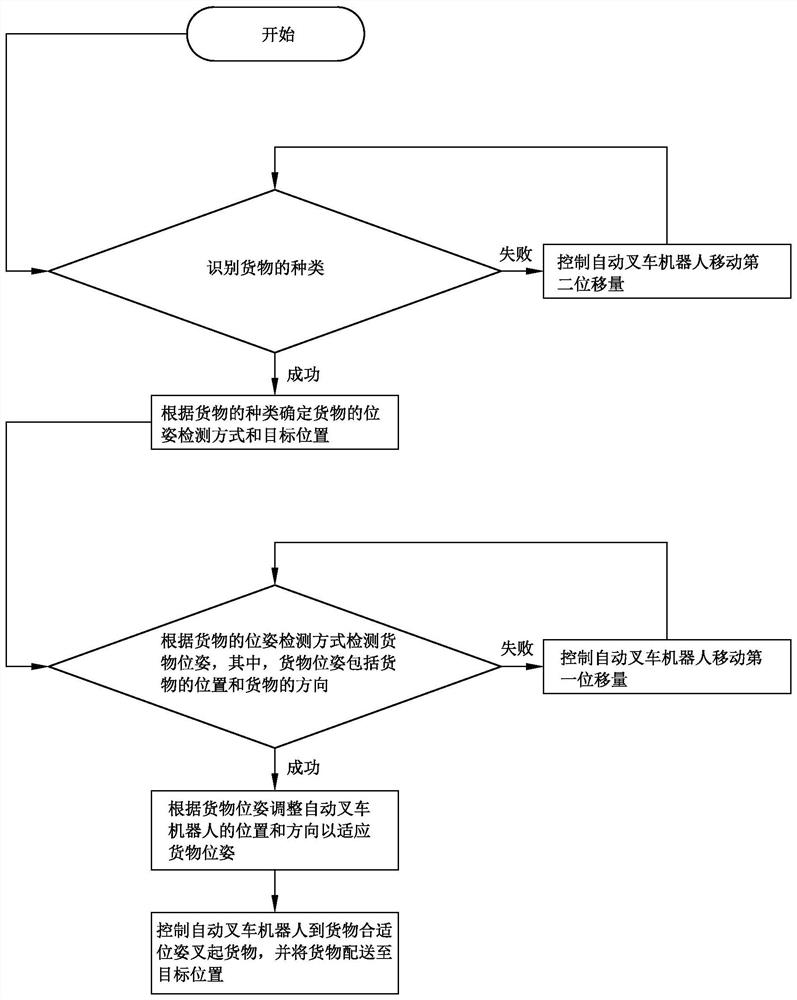
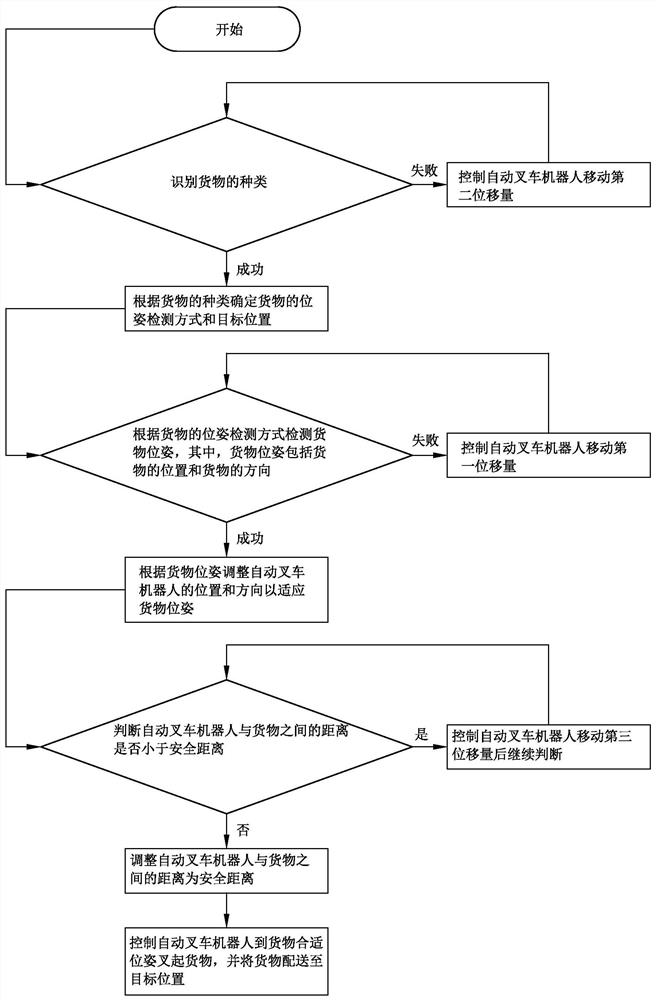
[0038] see figure 1 , the first embodiment of the present invention provides an automatic forklift robot docking method for automatically forking goods to be transported, the main steps of which include:
[0039] Determine the pose detection method and target position of the cargo according to the type of cargo;
[0040] Detect the pose of the cargo according to the pose detection method of the cargo; if the detection of the pose of the cargo fails, control the automatic forklift robot to move the first displacement and continue to detect the pose of the cargo; where the pose of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More