

Fruit identification method and device under same-color background and fruit picking robot
A technology for fruit recognition and recognition results, applied in the direction of neural learning methods, character and pattern recognition, instruments, etc., can solve problems such as inability to realize end-to-end detection process, consume large computing and storage resources, and influence of recognition effect interference
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0053] Embodiment 1 of the present invention provides a kind of fruit recognition method under the same color system background, and this method comprises:
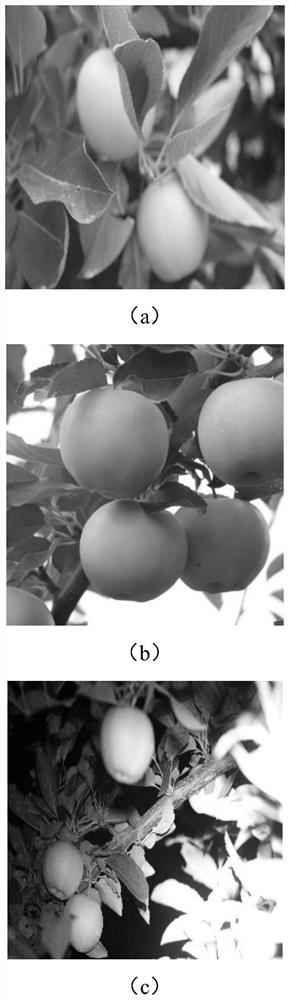
[0054] Obtain environmental photos in the orchard environment;
[0055] Inputting the environment photo into the recognition model to determine whether there are fruits in the environment photo;
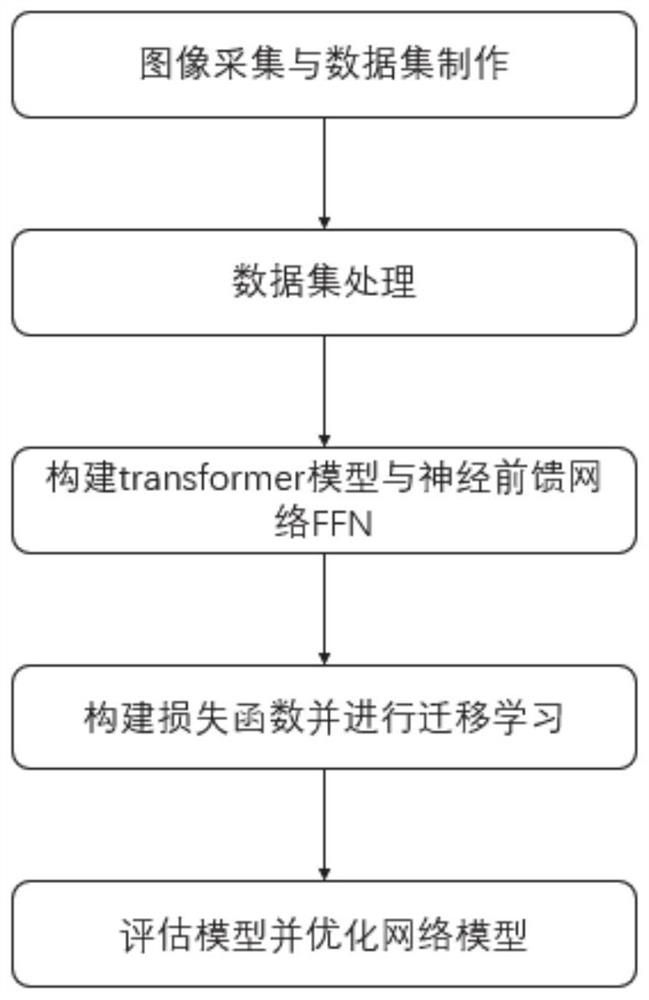
[0056] Wherein, the recognition model is: based on the constructed transformer model and neural feed-forward network FFN, it is obtained through machine learning training using multiple sets of data; each set of data in the multiple sets of data includes: environmental photos with fruits and Annotation information indicating that the photo has fruit.
[0057] In this embodiment 1, the training of the recognition model includes:
[0058] Collect multiple orchard environmental photos and label them. When labeling, label each target fruit as an independent connected domain and make it into a COCO format dataset;
[0059] Use the...
Embodiment 2
[0081] Embodiment 2 of the present invention provides a fruit identification device under the background of the same color system, the device includes:
[0082] An image acquisition module, used to obtain environmental photos in the orchard environment;
[0083] The recognition module is used to input the environmental photos into the recognition model to determine whether there are fruits in the environmental photos; wherein, the recognition model is: based on the constructed transformer model and the neural feed-forward network FFN, using multiple sets of data through the machine According to the learning and training, each set of data in the multiple sets of data includes: an environmental photo with fruit and label information identifying that the photo has fruit.
[0084] In this embodiment 2, the fruit recognition method under the background of the same color system is realized by using the above-mentioned fruit recognition device under the background of the same color s...
Embodiment 3
[0112] Embodiment 3 of the present invention provides a fruit picking robot, the robot includes a fruit recognition device under the background of the same color system, the device includes:
[0113] An image acquisition module, used to obtain environmental photos in the orchard environment;
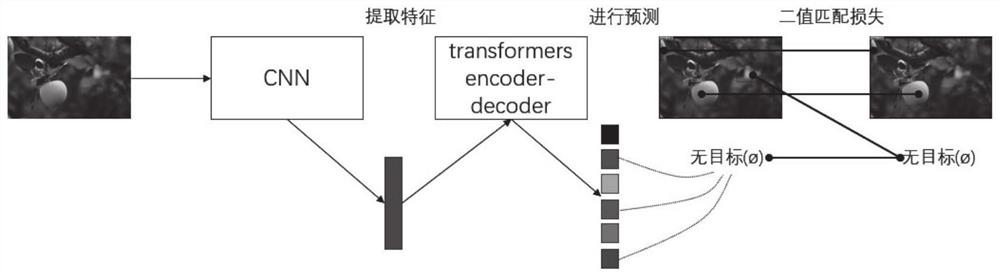
[0114] The recognition module is used to input the environmental photos into the recognition model, and determines whether there are fruits in the environmental photos, such as Image 6 shown. Wherein, the recognition model is: based on the constructed transformer model and neural feed-forward network FFN, it is obtained through machine learning training using multiple sets of data; each set of data in the multiple sets of data includes: environmental photos with fruits and Annotation information indicating that the photo has fruit.
[0115] In the third embodiment, the above-mentioned fruit recognition device is used to implement a transformer-based fruit detection method in the same ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More